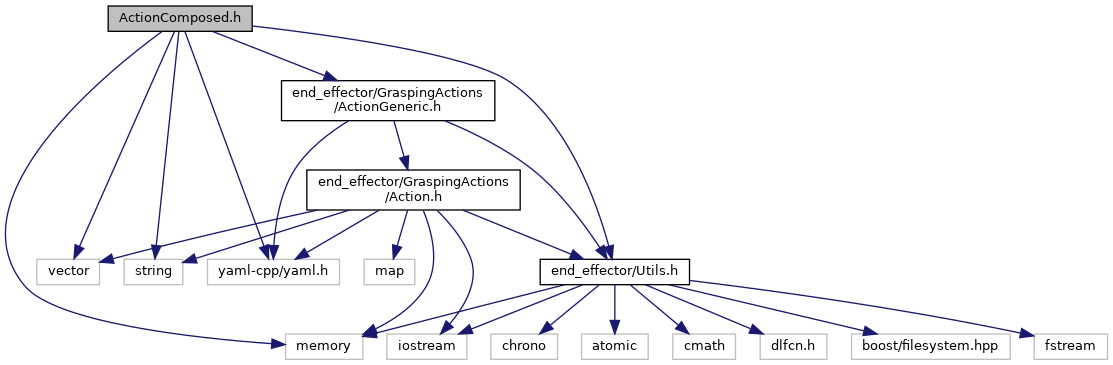
#include <vector>#include <string>#include <end_effector/GraspingActions/ActionGeneric.h>#include <end_effector/Utils.h>#include <yaml-cpp/yaml.h>#include <memory>
Include dependency graph for ActionComposed.h:
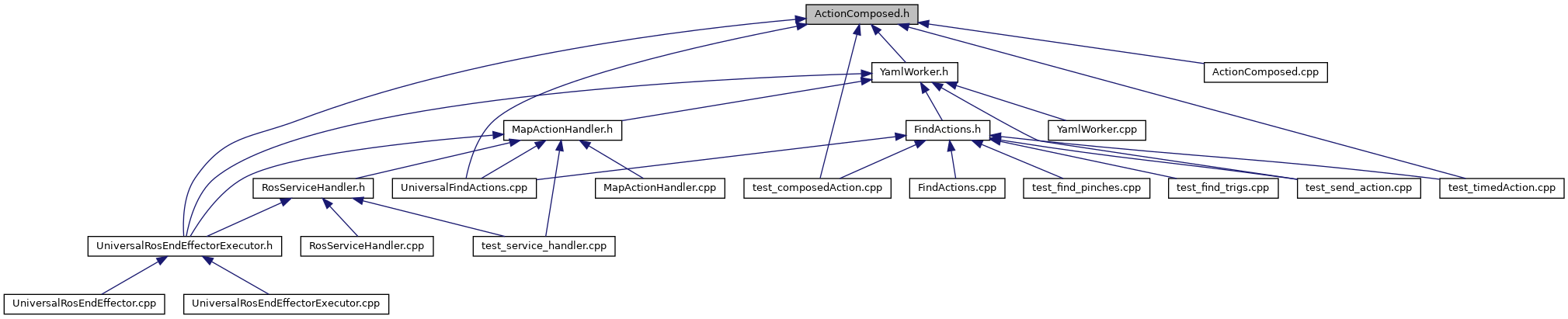
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | ROSEE::ActionComposed |
| A ActionComposed, which is formed by one or more Primitives (or even other composed). It is useful for example to create an action that grasp only with bending the tips (e.g. to take a dish from above) If the ActionComposed has the boolean value independent to true, it means that include indipendent sub-actions, so, each joint is used by at maximum by ONLY ONE of the sub-action inside. In this case the jointsInvolvedCount will contain only 0 or 1 values. If the ActionComposed is not independent, each joint position is calculated as the mean of all the joint position of the contained sub-actions that uses that joint. So each mean can include different primitives, so we used the jointsInvolvedCount vector to store the number of sub action that use each joint. More... | |
Namespaces | |
| ROSEE | |