Specializations of cras::to_string() for ROS types and messages. More...
#include <sstream>#include <string>#include <type_traits>#include <ros/duration.h>#include <ros/rate.h>#include <ros/time.h>#include <ros/message_traits.h>#include <cras_cpp_common/time_utils.hpp>
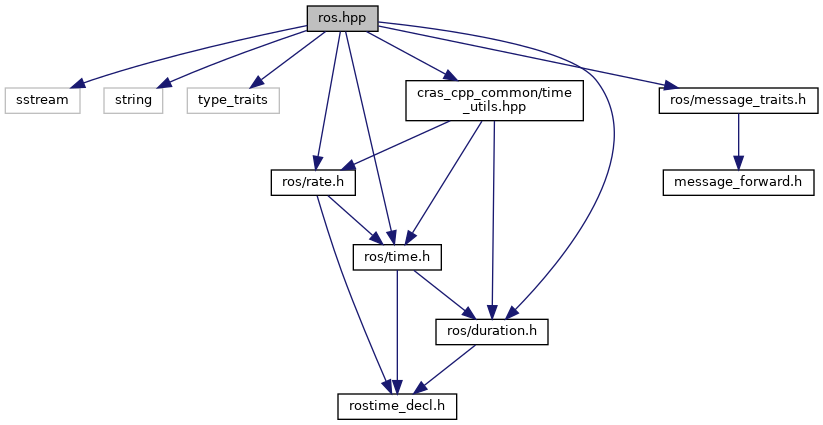
Include dependency graph for string_utils/ros.hpp:
Go to the source code of this file.
Namespaces | |
| cras | |
Functions | |
| template<typename T , typename ::std::enable_if_t< ::std::is_same< T, ::ros::Time >::value||::std::is_same< T, ::ros::WallTime >::value||::std::is_same< T, ::ros::SteadyTime >::value||::std::is_same< T, ::ros::Duration >::value||::std::is_same< T, ::ros::WallDuration >::value > * = nullptr> | |
| inline ::std::string | cras::to_string (const T &value) |
| template<typename M , ::std::enable_if_t<::ros::message_traits::IsMessage< M >::value > * = nullptr> | |
| std::string | cras::to_string (const M &msg) |
Detailed Description
Specializations of cras::to_string() for ROS types and messages.
Definition in file string_utils/ros.hpp.