NodeletWithSharedTfBuffer allows you to use a tf2_ros::Buffer provided by the nodelet manager. More...
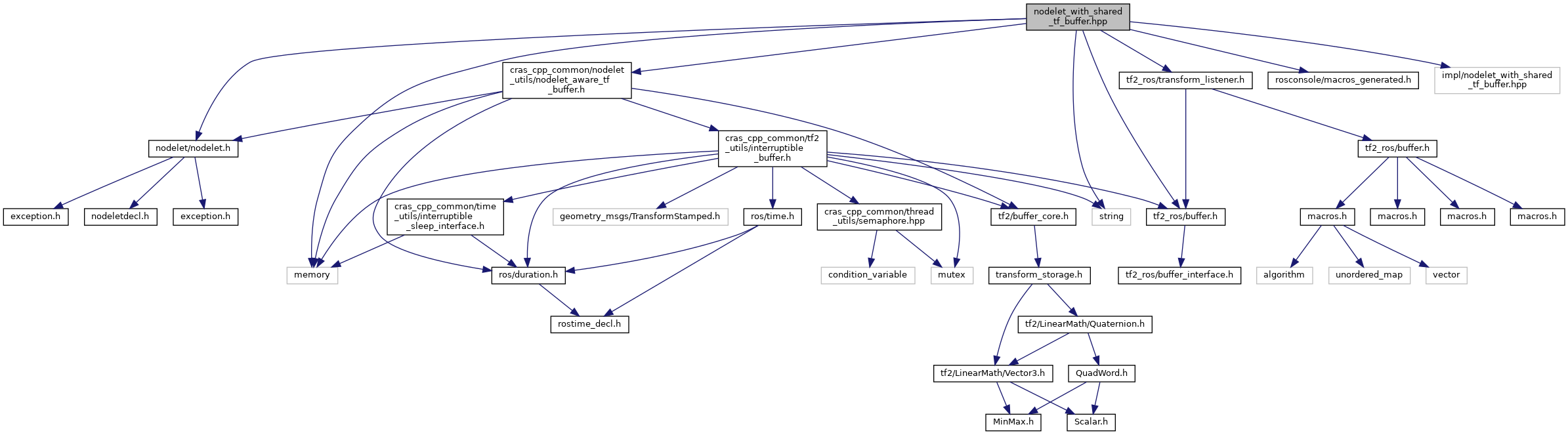
#include <memory>#include <string>#include <nodelet/nodelet.h>#include <rosconsole/macros_generated.h>#include <tf2_ros/buffer.h>#include <tf2_ros/transform_listener.h>#include <cras_cpp_common/nodelet_utils/nodelet_aware_tf_buffer.h>#include "impl/nodelet_with_shared_tf_buffer.hpp"
Include dependency graph for nodelet_with_shared_tf_buffer.hpp:
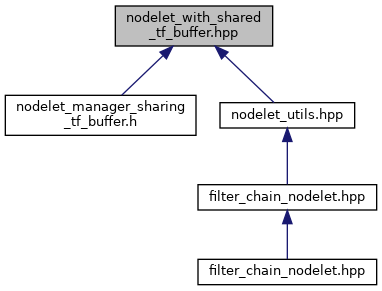
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | cras::NodeletWithSharedTfBuffer< NodeletType > |
A nodelet mixin that allows to use a tf2_ros::Buffer provided by the nodelet manager (which should save some computations). If this nodelet has also the StatefulNodelet mixin, the automatically created non-shared buffer is nodelet-aware (you can also pass a NodeletAwareTfBuffer to setBuffer()). That means any TF lookups done via this->getBuffer() will be able to correctly end when the nodelet is being unloaded (which normally hangs: https://github.com/ros/geometry2/issues/381). More... | |
| struct | cras::NodeletWithSharedTfBufferInterface |
| Public non-template API of NodeletWithSharedTfBuffer. Dynamic_cast a nodelet to this type if you need to access this API publicly. More... | |
Namespaces | |
| cras | |
| cras::impl | |
Detailed Description
NodeletWithSharedTfBuffer allows you to use a tf2_ros::Buffer provided by the nodelet manager.
Definition in file nodelet_with_shared_tf_buffer.hpp.