ROS message publisher and subscriber with automatic rate and delay diagnostics. More...
#include <functional>#include <memory>#include <string>#include <type_traits>#include <boost/function.hpp>#include <boost/shared_ptr.hpp>#include <diagnostic_updater/diagnostic_updater.h>#include <ros/forwards.h>#include <ros/message_event.h>#include <ros/message_traits.h>#include <ros/node_handle.h>#include <ros/publisher.h>#include <ros/rate.h>#include <ros/subscriber.h>#include <ros/subscribe_options.h>#include <cras_cpp_common/diag_utils/topic_status.hpp>#include <cras_cpp_common/diag_utils/topic_status_param.hpp>#include <cras_cpp_common/message_utils.hpp>#include <cras_cpp_common/param_utils/bound_param_helper.hpp>#include <cras_cpp_common/type_utils.hpp>#include <cras_cpp_common/diag_utils/impl/diagnosed_pub_sub.hpp>
Include dependency graph for diagnosed_pub_sub.hpp:

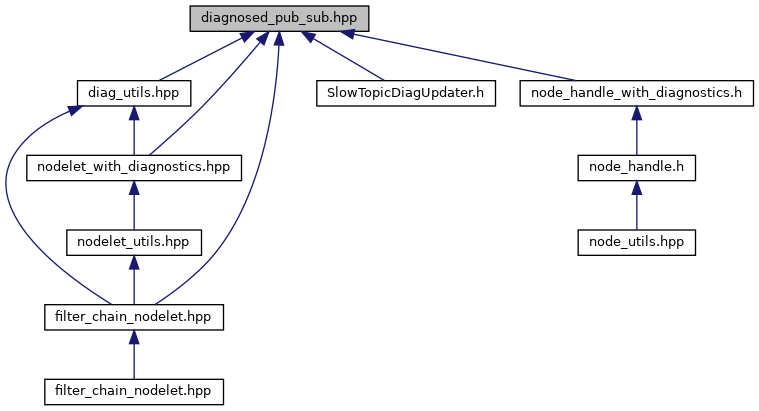
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | cras::DiagnosedPublisher< Message, Enable > |
| Wrapper for ROS publisher that automatically diagnoses the rate and delay of published messages. More... | |
| class | cras::DiagnosedPubSub< Message, Enable > |
| Base for ROS publisher and subscriber with automatic message rate and delay diagnostics. More... | |
| class | cras::DiagnosedSubscriber< Message, Enable > |
| Wrapper for ROS subscriber that automatically diagnoses the rate and delay of received messages. More... | |
Namespaces | |
| cras | |
Detailed Description
ROS message publisher and subscriber with automatic rate and delay diagnostics.
Definition in file diagnosed_pub_sub.hpp.