|
| | MOCK_CONST_METHOD0 (switchResult, SwitchState(void)) |
| |
| | MOCK_CONST_METHOD1 (checkForConflict, bool(const std::list< hardware_interface::ControllerInfo > &)) |
| |
| | MOCK_CONST_METHOD1 (switchResult, SwitchState(const hardware_interface::ControllerInfo &)) |
| |
| | MOCK_METHOD2 (init, bool(ros::NodeHandle &, ros::NodeHandle &)) |
| |
| | MOCK_METHOD2 (prepareSwitch, bool(const std::list< hardware_interface::ControllerInfo > &, const std::list< hardware_interface::ControllerInfo > &)) |
| |
| | MOCK_METHOD2 (doSwitch, void(const std::list< hardware_interface::ControllerInfo > &, const std::list< hardware_interface::ControllerInfo > &)) |
| |
| | MOCK_METHOD2 (read, void(const ros::Time &time, const ros::Duration &period)) |
| |
| | MOCK_METHOD2 (write, void(const ros::Time &time, const ros::Duration &period)) |
| |
| virtual bool | checkForConflict (const std::list< ControllerInfo > &info) const |
| |
| virtual bool | checkForConflict (const std::list< ControllerInfo > &info) const |
| |
| virtual void | doSwitch (const std::list< ControllerInfo > &, const std::list< ControllerInfo > &) |
| |
| virtual bool | init (ros::NodeHandle &, ros::NodeHandle &) |
| |
| virtual bool | prepareSwitch (const std::list< ControllerInfo > &, const std::list< ControllerInfo > &) |
| |
| virtual void | read (const ros::Time &, const ros::Duration &) |
| |
| virtual void | read (const ros::Time &, const ros::Duration &) |
| |
| virtual SwitchState | switchResult (const ControllerInfo &) const |
| |
| virtual SwitchState | switchResult () const |
| |
| virtual void | write (const ros::Time &, const ros::Duration &) |
| |
| virtual void | write (const ros::Time &, const ros::Duration &) |
| |
| virtual | ~RobotHW ()=default |
| |
| T * | get () |
| |
| std::vector< std::string > | getInterfaceResources (std::string iface_type) const |
| |
| std::vector< std::string > | getNames () const |
| |
| void | registerInterface (T *iface) |
| |
| void | registerInterfaceManager (InterfaceManager *iface_man) |
| |
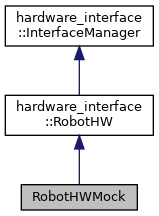
Definition at line 51 of file hwi_update_test.cpp.
 Public Types inherited from hardware_interface::RobotHW
Public Types inherited from hardware_interface::RobotHW