Interface for numerical integrators (explicit and implicit) More...
#include <integrator_interface.h>
Public Types | |
| using | Ptr = std::shared_ptr< NumericalIntegratorExplicitInterface > |
| using | UnaryFunction = const std::function< void(const Eigen::VectorXd &, Eigen::Ref< Eigen::VectorXd >)> |
| using | UPtr = std::unique_ptr< NumericalIntegratorExplicitInterface > |
 Public Types inherited from corbo::DynamicsEvalInterface Public Types inherited from corbo::DynamicsEvalInterface | |
| using | InputVector = Eigen::VectorXd |
| using | Ptr = std::shared_ptr< DynamicsEvalInterface > |
| using | StateVector = Eigen::VectorXd |
| using | UPtr = std::unique_ptr< DynamicsEvalInterface > |
Public Member Functions | |
| void | computeEqualityConstraint (const StateVector &x1, const InputVector &u1, const StateVector &x2, double dt, const SystemDynamicsInterface &system, Eigen::Ref< Eigen::VectorXd > error) override |
| Compute error between two consecutive (discrete) states. More... | |
| void | computeEqualityConstraint (const Eigen::Ref< const Eigen::VectorXd > &x1, const Eigen::Ref< const Eigen::VectorXd > &x2, double dt, const UnaryFunction &fun, Eigen::Ref< Eigen::VectorXd > error) |
| virtual int | getConvergenceOrder () const =0 |
| Return the convergence order. More... | |
| DynamicsEvalInterface::Ptr | getInstance () const override=0 |
| Return a newly created shared instance of the implemented class. More... | |
| virtual void | initialize (int state_dim) |
| Allocate memory for a given state dimension. More... | |
| bool | interpolate (const Eigen::Ref< const Eigen::VectorXd > &x1, const Eigen::Ref< const Eigen::VectorXd > &u1, const Eigen::Ref< const Eigen::VectorXd > &, const Eigen::Ref< const Eigen::VectorXd > &, double dt, const SystemDynamicsInterface &system, const Range &range, std::vector< Eigen::VectorXd > &states, std::vector< Eigen::VectorXd > &controls) override |
| virtual void | solveIVP (const Eigen::VectorXd &x1, double dt, const UnaryFunction &fun, Eigen::Ref< Eigen::VectorXd > x2)=0 |
| Solution of the initial value problem. More... | |
| virtual void | solveIVP (const StateVector &x1, const InputVector &u1, double dt, const SystemDynamicsInterface &system, Eigen::Ref< Eigen::VectorXd > x2)=0 |
| Solution of the initial value problem. More... | |
| virtual | ~NumericalIntegratorExplicitInterface () |
| Virtual destructor. More... | |
| Public Member Functions inherited from corbo::DynamicsEvalInterface | |
| virtual bool | interpolate (const std::vector< const Eigen::VectorXd *> &x, const std::vector< const Eigen::VectorXd *> &u, double dt, const SystemDynamicsInterface &system, const Range &range, std::vector< Eigen::VectorXd > &states, std::vector< Eigen::VectorXd > &controls) |
| virtual | ~DynamicsEvalInterface () |
| Virtual destructor. More... | |
Additional Inherited Members | |
| Static Public Member Functions inherited from corbo::DynamicsEvalInterface | |
| static Factory< DynamicsEvalInterface > & | getFactory () |
| Get access to the accociated factory. More... | |
Detailed Description
Interface for numerical integrators (explicit and implicit)
Explicit numerical integrators in the context of ordinary or partial differential equations determine the integral value only based on the previous or current time instance, e.g.:
![\[ // * x(t_0 + \Delta t) = \int_{t_0}^{t_0+\Delta T} f(x(t_0), t) dt // * \]](form_245.png)
.
Implicit methods require the solution of a (nonlinear) equation, since they also depend on the solution itself:
![\[ // * x(t_0 + \Delta t) = \int_{t_0}^{t_0+\Delta T} f(x(t_0+ \Delta T), x(t_0), t) dt // * \]](form_246.png)
.
This generic interface mainly provides access to the underlying quadrature rules. These might be used as part of an optimization or might be solved via root-finding directly. For a direct use of integrators you might refer to the subclass NumericalIntegratorExplicitInterface. @remark This interface is provided with factory support. @see NumericalIntegratorExplicitInterface FiniteDifferencesInterface @author Christoph Rösmann (christoph.roesmann@tu-dortmund.de)
- Todo:
- This interface is not yet completed (messages, subclasses, ...)
Allocate memory for a given state dimension
- Remarks
- This method is optional and not guaranteed to be called, but if so this might speed up computation.
- Parameters
-
[in] state_dim Expected dimension of the state vector Compute equality constraint containing the implicit quadrature/interpolation formula (system dynamics specialization)
![\[ // * e = \int_{t=0}^{t=\Delta T} f(x(t), u_1) dt - x_2 = 0 // * \]](form_247.png)
.
@param[in] x1 Initial state vector [SystemDynamicsInterface::getStateDimension() x 1]
@param[in] u1 Constant control input vector [SystemDynamicsInterface::getInputDimension() x 1]
@param[in] x2 Final state vector [SystemDynamicsInterface::getStateDimension() x 1]
@param[in] dt Time interval length
@param[in] system System dynamics object
@param[out] error Resulting error [SystemDynamicsInterface::getStateDimension() x 1] (must be preallocated)Compute equality constraint containing the implicit quadrature/interpolation formula (unary function specialization)
![\[ // * e = \int_{t=0}^{t=\Delta T} f(x(t)) dt - x_2 = 0 // * \]](form_248.png)
.
@param[in] x1 Initial function argument
@param[in] x2 Final function argument
@param[in] dt Time interval length
@param[in] fun f(x) to be integrated in the interval [0, dt]
@param[out] error Resulting error [SystemDynamicsInterface::getStateDimension() x 1] (must be preallocated)Interface for explicit numerical integrators
Explicit numerical integrators in the context of ordinary or partial differential equations determine the integral value only based on the previous or current time instance, e.g.:
![\[ x(t_0 + \Delta t) = \int_{t_0}^{t_0+\Delta T} f(x(t_0), t) dt \]](form_249.png)
.
- Remarks
- This interface is provided with factory support (DynamicsEval).
- See also
- NumericalIntegratorInterface FiniteDifferencesInterface
Definition at line 158 of file integrator_interface.h.
Member Typedef Documentation
◆ Ptr
| using corbo::NumericalIntegratorExplicitInterface::Ptr = std::shared_ptr<NumericalIntegratorExplicitInterface> |
Definition at line 161 of file integrator_interface.h.
◆ UnaryFunction
| using corbo::NumericalIntegratorExplicitInterface::UnaryFunction = const std::function<void(const Eigen::VectorXd&, Eigen::Ref<Eigen::VectorXd>)> |
Definition at line 164 of file integrator_interface.h.
◆ UPtr
| using corbo::NumericalIntegratorExplicitInterface::UPtr = std::unique_ptr<NumericalIntegratorExplicitInterface> |
Definition at line 162 of file integrator_interface.h.
Constructor & Destructor Documentation
◆ ~NumericalIntegratorExplicitInterface()
|
inlinevirtual |
Virtual destructor.
Definition at line 169 of file integrator_interface.h.
Member Function Documentation
◆ computeEqualityConstraint() [1/2]
|
inlineoverridevirtual |
Compute error between two consecutive (discrete) states.
![\[ e = f(x,u,t) - \dot{x} \]](form_228.png)
.
- Remarks
- We require no alias between
errorand all other parameters!
- Parameters
-
[in] x1 Initial state vector [SystemDynamicsInterface::getStateDimension() x 1] [in] u1 Constant control input vector [SystemDynamicsInterface::getInputDimension() x 1] [in] x2 Final state vector [SystemDynamicsInterface::getStateDimension() x 1] [in] dt Time interval length [in] system System dynamics object [out] error Resulting error [SystemDynamicsInterface::getStateDimension() x 1] (must be preallocated)
Implements corbo::DynamicsEvalInterface.
Definition at line 217 of file integrator_interface.h.
◆ computeEqualityConstraint() [2/2]
|
inline |
Definition at line 224 of file integrator_interface.h.
◆ getConvergenceOrder()
|
pure virtual |
Return the convergence order.
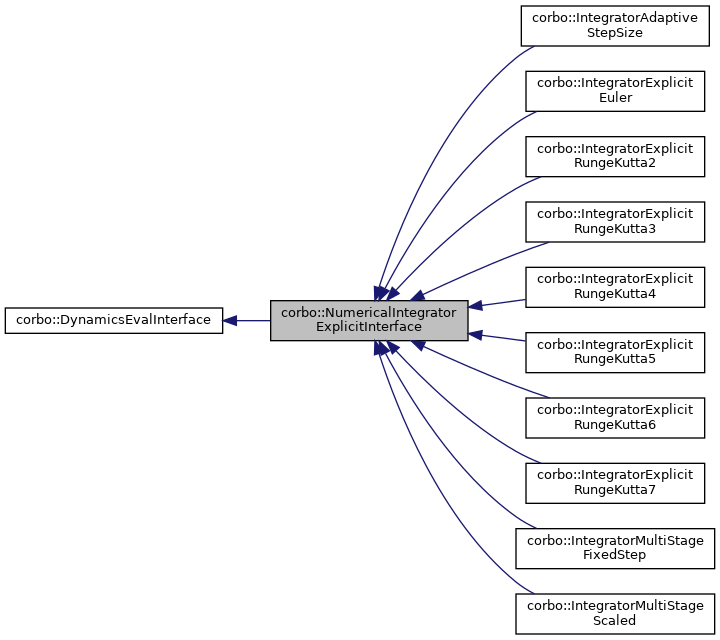
Implemented in corbo::IntegratorMultiStageScaled, corbo::IntegratorMultiStageFixedStep, corbo::IntegratorAdaptiveStepSize, corbo::IntegratorExplicitRungeKutta7, corbo::IntegratorExplicitRungeKutta6, corbo::IntegratorExplicitRungeKutta5, corbo::IntegratorExplicitRungeKutta4, corbo::IntegratorExplicitRungeKutta3, corbo::IntegratorExplicitRungeKutta2, and corbo::IntegratorExplicitEuler.
◆ getInstance()
|
overridepure virtual |
Return a newly created shared instance of the implemented class.
Implements corbo::DynamicsEvalInterface.
Implemented in corbo::IntegratorMultiStageScaled, corbo::IntegratorMultiStageFixedStep, corbo::IntegratorAdaptiveStepSize, corbo::IntegratorExplicitRungeKutta7, corbo::IntegratorExplicitRungeKutta6, corbo::IntegratorExplicitRungeKutta5, corbo::IntegratorExplicitRungeKutta4, corbo::IntegratorExplicitRungeKutta3, corbo::IntegratorExplicitRungeKutta2, and corbo::IntegratorExplicitEuler.
◆ initialize()
|
inlinevirtual |
Allocate memory for a given state dimension.
- Remarks
- This method is optional and not guaranteed to be called, but if so this might speed up computation.
- Parameters
-
[in] state_dim Expected dimension of the state vector
Reimplemented in corbo::IntegratorAdaptiveStepSize, corbo::IntegratorExplicitRungeKutta7, corbo::IntegratorExplicitRungeKutta6, corbo::IntegratorExplicitRungeKutta5, corbo::IntegratorExplicitRungeKutta4, corbo::IntegratorExplicitRungeKutta3, and corbo::IntegratorExplicitRungeKutta2.
Definition at line 182 of file integrator_interface.h.
◆ interpolate()
|
inlineoverridevirtual |
Implements corbo::DynamicsEvalInterface.
Definition at line 231 of file integrator_interface.h.
◆ solveIVP() [1/2]
|
pure virtual |
Solution of the initial value problem.
![\[ x(t=\Delta T) = \int_{t=0}^{t=\Delta T} f(x(t)) dt \]](form_250.png)
with $ x(t=0) = x_1 $.
- Parameters
-
[in] x1 Initial state vector [SystemDynamicsInterface::getStateDimension() x 1] [in] u1 Constant control input vector [SystemDynamicsInterface::getInputDimension() x 1] [in] dt Time interval length [in] system System dynamics object [out] x2 Resulting state vector [SystemDynamicsInterface::getStateDimension() x 1] (must be preallocated)
Implemented in corbo::IntegratorMultiStageScaled, and corbo::IntegratorMultiStageFixedStep.
◆ solveIVP() [2/2]
|
pure virtual |
Solution of the initial value problem.
![\[ x(t=\Delta T) = \int_{t=0}^{t=\Delta T} f(x(t), u_1) dt \]](form_251.png)
with $ x(t=0) = x_1 $.
- Parameters
-
[in] x1 Initial state vector [SystemDynamicsInterface::getStateDimension() x 1] [in] u1 Constant control input vector [SystemDynamicsInterface::getInputDimension() x 1] [in] dt Time interval length [in] system System dynamics object [out] x2 Resulting state vector [SystemDynamicsInterface::getStateDimension() x 1] (must be preallocated)
Implemented in corbo::IntegratorMultiStageScaled, corbo::IntegratorMultiStageFixedStep, corbo::IntegratorAdaptiveStepSize, corbo::IntegratorExplicitRungeKutta7, corbo::IntegratorExplicitRungeKutta6, corbo::IntegratorExplicitRungeKutta5, corbo::IntegratorExplicitRungeKutta4, corbo::IntegratorExplicitRungeKutta3, corbo::IntegratorExplicitRungeKutta2, and corbo::IntegratorExplicitEuler.
The documentation for this class was generated from the following file: