#include <stdio.h>#include <stdlib.h>#include <string.h>#include <vector>#include <sys/wait.h>#include <sys/types.h>#include <sys/socket.h>#include <netinet/in.h>#include <netinet/tcp.h>#include <pthread.h>#include <thread>#include <arpa/inet.h>#include <opencv2/opencv.hpp>#include <opencv2/core/core.hpp>#include <opencv2/highgui/highgui.hpp>#include <opencv2/imgproc/imgproc.hpp>#include <octomap/octomap.h>#include "../include/eigen/Eigen/Dense"#include "../include/eigen/Eigen/src/Geometry/Quaternion.h"#include "../include/se2/se2.h"#include "global.h"
Include dependency graph for data_engine.h:

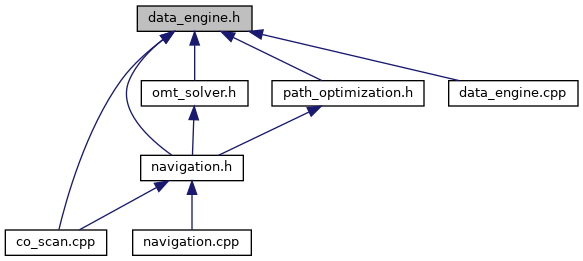
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | CellMap |
| class | DataEngine |
| class | Recon2D |
| class | Recon3D |
Macros | |
| #define | PORT 3333 |
Variables | |
| const double | free_voxel_porject_height = project_max_height |
| const float | map_cellsize = 0.05 |
| const int | map_cols = 1200 |
| const int | map_rows = 1200 |
| const double | project_max_height = 1.5 |
| const double | project_min_height = 0.15 |
| const float | xmax_oc_g = 30 |
| const float | xmin_oc_g = -30 |
| const float | zmax_oc_g = 30 |
| const float | zmin_oc_g = -30 |
Macro Definition Documentation
◆ PORT
| #define PORT 3333 |
Definition at line 112 of file data_engine.h.
Variable Documentation
◆ free_voxel_porject_height
| const double free_voxel_porject_height = project_max_height |
Definition at line 49 of file data_engine.h.
◆ map_cellsize
| const float map_cellsize = 0.05 |
Definition at line 39 of file data_engine.h.
◆ map_cols
| const int map_cols = 1200 |
Definition at line 41 of file data_engine.h.
◆ map_rows
| const int map_rows = 1200 |
Definition at line 40 of file data_engine.h.
◆ project_max_height
| const double project_max_height = 1.5 |
Definition at line 47 of file data_engine.h.
◆ project_min_height
| const double project_min_height = 0.15 |
Definition at line 48 of file data_engine.h.
◆ xmax_oc_g
| const float xmax_oc_g = 30 |
Definition at line 42 of file data_engine.h.
◆ xmin_oc_g
| const float xmin_oc_g = -30 |
Definition at line 43 of file data_engine.h.
◆ zmax_oc_g
| const float zmax_oc_g = 30 |
Definition at line 44 of file data_engine.h.
◆ zmin_oc_g
| const float zmin_oc_g = -30 |
Definition at line 45 of file data_engine.h.