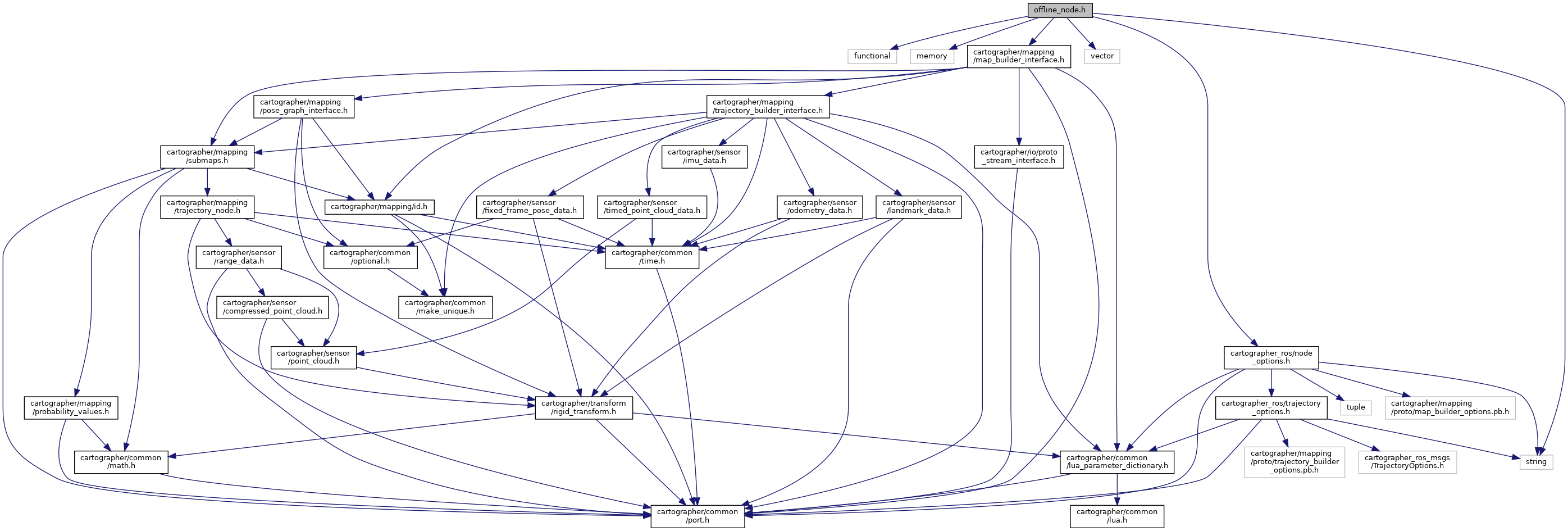
#include <functional>#include <memory>#include <string>#include <vector>#include "cartographer/mapping/map_builder_interface.h"#include "cartographer_ros/node_options.h"
Include dependency graph for offline_node.h:
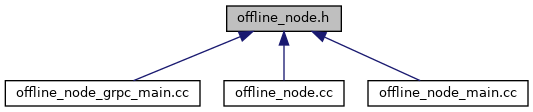
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| cartographer_ros | |
Typedefs | |
| using | cartographer_ros::MapBuilderFactory = std::function< std::unique_ptr<::cartographer::mapping::MapBuilderInterface >(const ::cartographer::mapping::proto::MapBuilderOptions &)> |
Functions | |
| void | cartographer_ros::RunOfflineNode (const MapBuilderFactory &map_builder_factory) |