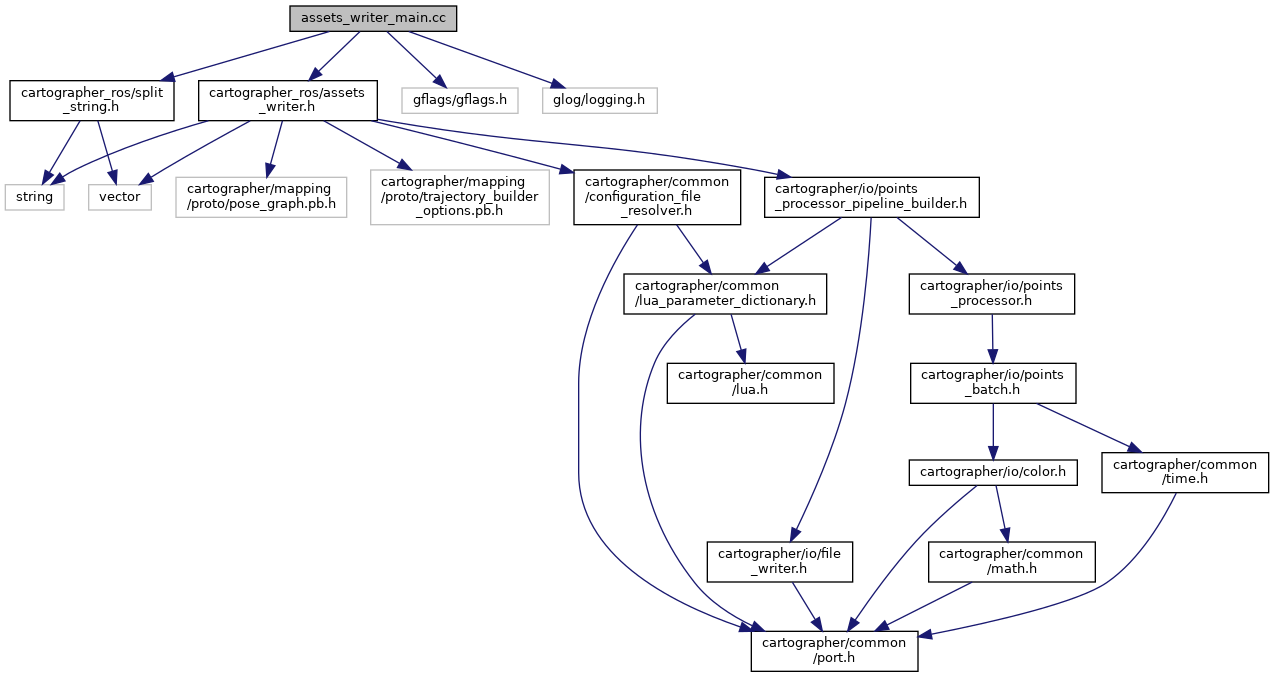
#include "cartographer_ros/assets_writer.h"
#include "cartographer_ros/split_string.h"
#include "gflags/gflags.h"
#include "glog/logging.h"
Go to the source code of this file.
|
| | DEFINE_bool (use_bag_transforms, true, "Whether to read and use the transforms from the bag.") |
| |
| | DEFINE_string (configuration_directory, "", "First directory in which configuration files are searched, " "second is always the Cartographer installation to allow " "including files from there.") |
| |
| | DEFINE_string (configuration_basename, "", "Basename, i.e. not containing any directory prefix, of the " "configuration file.") |
| |
| | DEFINE_string (urdf_filename, "", "URDF file that contains static links for your sensor configuration.") |
| |
| | DEFINE_string (bag_filenames, "", "Bags to process, must be in the same order as the trajectories " "in 'pose_graph_filename'.") |
| |
| | DEFINE_string (pose_graph_filename, "", "Proto stream file containing the pose graph.") |
| |
| | DEFINE_string (output_file_prefix, "", "Will be prefixed to all output file names and can be used to " "define the output directory. If empty, the first bag filename " "will be used.") |
| |
| int | main (int argc, char **argv) |
| |
◆ DEFINE_bool()
| DEFINE_bool |
( |
use_bag_transforms |
, |
|
|
true |
, |
|
|
"Whether to read and use the transforms from the bag." |
|
|
) |
| |
◆ DEFINE_string() [1/6]
| DEFINE_string |
( |
configuration_directory |
, |
|
|
"" |
, |
|
|
"First directory in which configuration files are |
searched, |
|
|
" "second is always the Cartographer installation to allow " "including files from there." |
|
|
) |
| |
◆ DEFINE_string() [2/6]
| DEFINE_string |
( |
configuration_basename |
, |
|
|
"" |
, |
|
|
" |
Basename, |
|
|
i.e. not containing any directory |
prefix, |
|
|
of the " "configuration file." |
|
|
) |
| |
◆ DEFINE_string() [3/6]
| DEFINE_string |
( |
urdf_filename |
, |
|
|
"" |
, |
|
|
"URDF file that contains static links for your sensor configuration." |
|
|
) |
| |
◆ DEFINE_string() [4/6]
| DEFINE_string |
( |
bag_filenames |
, |
|
|
"" |
, |
|
|
"Bags to |
process, |
|
|
must be in the same order as the trajectories " "in 'pose_graph_filename'." |
|
|
) |
| |
◆ DEFINE_string() [5/6]
| DEFINE_string |
( |
pose_graph_filename |
, |
|
|
"" |
, |
|
|
"Proto stream file containing the pose graph." |
|
|
) |
| |
◆ DEFINE_string() [6/6]
| DEFINE_string |
( |
output_file_prefix |
, |
|
|
"" |
, |
|
|
"Will be prefixed to all output file names and can be used to " "define the output directory. If |
empty, |
|
|
the first bag filename " "will be used." |
|
|
) |
| |
◆ main()
| int main |
( |
int |
argc, |
|
|
char ** |
argv |
|
) |
| |