#include <action_test_node.h>
Public Member Functions | |
| AsyncActionTest (const std::string &name, BT::Duration deadline_ms=std::chrono::milliseconds(100)) | |
| int | failureCount () const |
| virtual void | halt () override |
| void | resetCounters () |
| void | setExpectedResult (NodeStatus res) |
| void | setTime (BT::Duration time) |
| int | successCount () const |
| BT::NodeStatus | tick () override |
| Method to be implemented by the user. More... | |
| int | tickCount () const |
| virtual | ~AsyncActionTest () override |
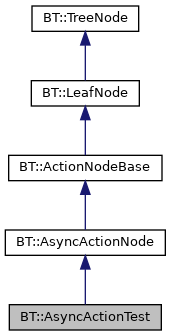
 Public Member Functions inherited from BT::AsyncActionNode Public Member Functions inherited from BT::AsyncActionNode | |
| AsyncActionNode (const std::string &name, const NodeConfiguration &config) | |
| virtual NodeStatus | executeTick () override final |
| The method that should be used to invoke tick() and setStatus();. More... | |
| bool | isHaltRequested () const |
| Public Member Functions inherited from BT::ActionNodeBase | |
| ActionNodeBase (const std::string &name, const NodeConfiguration &config) | |
| virtual NodeType | type () const override final |
| ~ActionNodeBase () override=default | |
| Public Member Functions inherited from BT::LeafNode | |
| LeafNode (const std::string &name, const NodeConfiguration &config) | |
| virtual | ~LeafNode () override=default |
| Public Member Functions inherited from BT::TreeNode | |
| const NodeConfiguration & | config () const |
| void | emitStateChanged () |
| template<typename T > | |
| Result | getInput (const std::string &key, T &destination) const |
| template<typename T > | |
| Optional< T > | getInput (const std::string &key) const |
| StringView | getRawPortValue (const std::string &key) const |
| bool | isHalted () const |
| const std::string & | name () const |
| Name of the instance, not the type. More... | |
| const std::string & | registrationName () const |
| registrationName is the ID used by BehaviorTreeFactory to create an instance. More... | |
| template<typename T > | |
| Result | setOutput (const std::string &key, const T &value) |
| void | setPostTickOverrideFunction (PostTickOverrideCallback callback) |
| void | setPreTickOverrideFunction (PreTickOverrideCallback callback) |
| NodeStatus | status () const |
| StatusChangeSubscriber | subscribeToStatusChange (StatusChangeCallback callback) |
| subscribeToStatusChange is used to attach a callback to a status change. When StatusChangeSubscriber goes out of scope (it is a shared_ptr) the callback is unsubscribed automatically. More... | |
| TreeNode (std::string name, NodeConfiguration config) | |
| TreeNode main constructor. More... | |
| uint16_t | UID () const |
| BT::NodeStatus | waitValidStatus () |
| virtual | ~TreeNode ()=default |
Private Attributes | |
| std::atomic< NodeStatus > | expected_result_ |
| int | failure_count_ |
| int | success_count_ |
| std::atomic< int > | tick_count_ |
| BT::Duration | time_ |
Detailed Description
Definition at line 32 of file action_test_node.h.
Constructor & Destructor Documentation
◆ AsyncActionTest()
| BT::AsyncActionTest::AsyncActionTest | ( | const std::string & | name, |
| BT::Duration | deadline_ms = std::chrono::milliseconds(100) |
||
| ) |
Definition at line 17 of file action_test_node.cpp.
◆ ~AsyncActionTest()
|
inlineoverridevirtual |
Definition at line 38 of file action_test_node.h.
Member Function Documentation
◆ failureCount()
|
inline |
Definition at line 63 of file action_test_node.h.
◆ halt()
|
overridevirtual |
The method used to interrupt the execution of a RUNNING node. Only Async nodes that may return RUNNING should implement it.
Reimplemented from BT::AsyncActionNode.
Definition at line 56 of file action_test_node.cpp.
◆ resetCounters()
|
inline |
Definition at line 68 of file action_test_node.h.
◆ setExpectedResult()
| void BT::AsyncActionTest::setExpectedResult | ( | BT::NodeStatus | res | ) |
Definition at line 67 of file action_test_node.cpp.
◆ setTime()
| void BT::AsyncActionTest::setTime | ( | BT::Duration | time | ) |
Definition at line 62 of file action_test_node.cpp.
◆ successCount()
|
inline |
Definition at line 58 of file action_test_node.h.
◆ tick()
|
overridevirtual |
Method to be implemented by the user.
Implements BT::TreeNode.
Definition at line 25 of file action_test_node.cpp.
◆ tickCount()
|
inline |
Definition at line 53 of file action_test_node.h.
Member Data Documentation
◆ expected_result_
|
private |
Definition at line 78 of file action_test_node.h.
◆ failure_count_
|
private |
Definition at line 81 of file action_test_node.h.
◆ success_count_
|
private |
Definition at line 80 of file action_test_node.h.
◆ tick_count_
|
private |
Definition at line 79 of file action_test_node.h.
◆ time_
|
private |
Definition at line 77 of file action_test_node.h.
The documentation for this class was generated from the following files: