#include <qpOASES/SQProblem.hpp>#include <qpOASES/SparseSolver.hpp>#include <qpOASES/SQProblemSchur.ipp>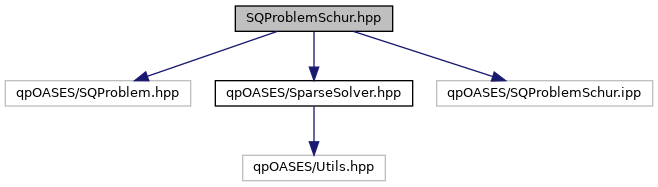

Go to the source code of this file.
Classes | |
| class | SQProblemSchur |
| Implements the online active set strategy for QPs with varying, sparse matrices. More... | |
Macros | |
| #define | TRCON dtrcon_ |
| #define | TRTRS dtrtrs_ |
Functions | |
| void | dtrcon_ (const char *NORM, const char *UPLO, const char *DIAG, const unsigned long *N, double *A, const unsigned long *LDA, double *RCOND, double *WORK, const unsigned long *IWORK, long *INFO) |
| void | dtrtrs_ (const char *UPLO, const char *TRANS, const char *DIAG, const unsigned long *N, const unsigned long *NRHS, double *A, const unsigned long *LDA, double *B, const unsigned long *LDB, long *INFO) |
| void | strcon_ (const char *NORM, const char *UPLO, const char *DIAG, const unsigned long *N, float *A, const unsigned long *LDA, float *RCOND, float *WORK, const unsigned long *IWORK, long *INFO) |
| void | strtrs_ (const char *UPLO, const char *TRANS, const char *DIAG, const unsigned long *N, const unsigned long *NRHS, float *A, const unsigned long *LDA, float *B, const unsigned long *LDB, long *INFO) |
Detailed Description
- Version
- 3.2
- Date
- 2012-2015
Declaration of the SQProblemSchur class which is able to use the newly developed online active set strategy for parametric quadratic programming with varying matrices and uses a Schur Complement approach to solve the linear systems.
Definition in file SQProblemSchur.hpp.
Macro Definition Documentation
◆ TRCON
| #define TRCON dtrcon_ |
Macro for calling level 3 BLAS operation in double precision.
Definition at line 65 of file SQProblemSchur.hpp.
◆ TRTRS
| #define TRTRS dtrtrs_ |
Macro for calling level 3 BLAS operation in double precision. Macro for calling level 3 BLAS operation in double precision. Macro for calling level 3 BLAS operation in double precision.
Definition at line 63 of file SQProblemSchur.hpp.
Function Documentation
◆ dtrcon_()
| void dtrcon_ | ( | const char * | NORM, |
| const char * | UPLO, | ||
| const char * | DIAG, | ||
| const unsigned long * | N, | ||
| double * | A, | ||
| const unsigned long * | LDA, | ||
| double * | RCOND, | ||
| double * | WORK, | ||
| const unsigned long * | IWORK, | ||
| long * | INFO | ||
| ) |
Estimate the reciprocal of the condition number of a triangular matrix in double precision
Definition at line 137 of file qpOASES-3.2.0/src/LAPACKReplacement.cpp.
◆ dtrtrs_()
| void dtrtrs_ | ( | const char * | UPLO, |
| const char * | TRANS, | ||
| const char * | DIAG, | ||
| const unsigned long * | N, | ||
| const unsigned long * | NRHS, | ||
| double * | A, | ||
| const unsigned long * | LDA, | ||
| double * | B, | ||
| const unsigned long * | LDB, | ||
| long * | INFO | ||
| ) |
Compute a QR factorization of a real M-by-N matrix A in double precision Compute a QR factorization of a real M-by-N matrix A in single precision Multiply C with orthogonal matrix Q**T as returned by geqrf (double precision) Multiply C with orthogonal matrix Q**T as returned by geqrf (single precision) Solve a triangular system (double precision)
Definition at line 121 of file qpOASES-3.2.0/src/LAPACKReplacement.cpp.
◆ strcon_()
| void strcon_ | ( | const char * | NORM, |
| const char * | UPLO, | ||
| const char * | DIAG, | ||
| const unsigned long * | N, | ||
| float * | A, | ||
| const unsigned long * | LDA, | ||
| float * | RCOND, | ||
| float * | WORK, | ||
| const unsigned long * | IWORK, | ||
| long * | INFO | ||
| ) |
Estimate the reciprocal of the condition number of a triangular matrix in single precision
Definition at line 145 of file qpOASES-3.2.0/src/LAPACKReplacement.cpp.
◆ strtrs_()
| void strtrs_ | ( | const char * | UPLO, |
| const char * | TRANS, | ||
| const char * | DIAG, | ||
| const unsigned long * | N, | ||
| const unsigned long * | NRHS, | ||
| float * | A, | ||
| const unsigned long * | LDA, | ||
| float * | B, | ||
| const unsigned long * | LDB, | ||
| long * | INFO | ||
| ) |
Solve a triangular system (single precision)
Definition at line 129 of file qpOASES-3.2.0/src/LAPACKReplacement.cpp.