#include <math.h>#include <stdio.h>#include <string.h>#include <unistd.h>#include <fcntl.h>#include <sys/stat.h>#include <sys/time.h>#include <sys/types.h>#include <time.h>#include <shvel-param.h>#include <param.h>#include <control.h>#include <adinput.h>#include <utility.h>#include <yprintf.h>#include <communication.h>#include <serial.h>#include <ssm_spur_handler.h>#include <ypspur.h>#include <cartesian2d.h>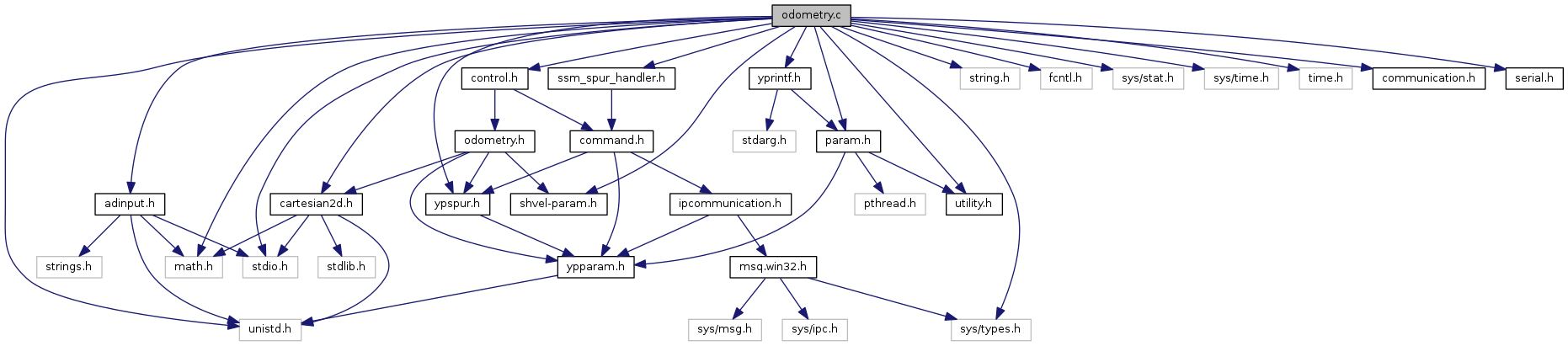
Go to the source code of this file.
Functions | |
| void | cstrans_odometry (YPSpur_cs cs, OdometryPtr dst_odm) |
| void | cstrans_xy (YPSpur_cs src, YPSpur_cs dest, double *x, double *y, double *theta) |
| CSptr | get_cs_pointer (YPSpur_cs cs) |
| ErrorStatePtr | get_error_state_ptr () |
| OdometryPtr | get_odometry_ptr () |
| void | init_coordinate_systems (void) |
| void | init_odometry (void) |
| void | odometry (OdometryPtr xp, short *cnt, short *pwm, double dt, double time) |
| int | odometry_receive (char *buf, int len, double receive_time, void *data) |
| int | odometry_receive_loop (void) |
| void | process_int (OdometryPtr xp, ErrorStatePtr err, int param_id, int id, int value, double receive_time) |
| void | set_cs (YPSpur_cs cs, double x, double y, double theta) |
| double | time_estimate (int readnum) |
| 時刻の推定 (n回目の計測結果の時刻を計算する) More... | |
| double | time_synchronize (double receive_time, int readnum, int wp) |
| ビットレートとか読み込める文字数を観測時刻の推定 More... | |
Variables | |
| CSptr | g_BL |
| CSptr | g_BS |
| ErrorState | g_error_state |
| double | g_estimated_delay = 0 |
| CSptr | g_FS |
| CSptr | g_GL |
| double | g_interval |
| CSptr | g_LC |
| Odometry | g_odometry |
| double | g_offset |
| int | g_offset_point |
| CSptr | g_SP |
Function Documentation
| void cstrans_odometry | ( | YPSpur_cs | cs, |
| OdometryPtr | dst_odm | ||
| ) |
Definition at line 316 of file odometry.c.
Definition at line 131 of file odometry.c.
Definition at line 102 of file odometry.c.
| ErrorStatePtr get_error_state_ptr | ( | ) |
Definition at line 337 of file odometry.c.
| OdometryPtr get_odometry_ptr | ( | ) |
Definition at line 332 of file odometry.c.
| void init_coordinate_systems | ( | void | ) |
Definition at line 69 of file odometry.c.
| void init_odometry | ( | void | ) |
Definition at line 80 of file odometry.c.
| void odometry | ( | OdometryPtr | xp, |
| short * | cnt, | ||
| short * | pwm, | ||
| double | dt, | ||
| double | time | ||
| ) |
Definition at line 144 of file odometry.c.
| int odometry_receive | ( | char * | buf, |
| int | len, | ||
| double | receive_time, | ||
| void * | data | ||
| ) |
Definition at line 432 of file odometry.c.
| int odometry_receive_loop | ( | void | ) |
Definition at line 585 of file odometry.c.
| void process_int | ( | OdometryPtr | xp, |
| ErrorStatePtr | err, | ||
| int | param_id, | ||
| int | id, | ||
| int | value, | ||
| double | receive_time | ||
| ) |
Definition at line 247 of file odometry.c.
| void set_cs | ( | YPSpur_cs | cs, |
| double | x, | ||
| double | y, | ||
| double | theta | ||
| ) |
Definition at line 138 of file odometry.c.
| double time_estimate | ( | int | readnum | ) |
時刻の推定 (n回目の計測結果の時刻を計算する)
- Parameters
-
int readnum[in] : 計測回数
Definition at line 346 of file odometry.c.
| double time_synchronize | ( | double | receive_time, |
| int | readnum, | ||
| int | wp | ||
| ) |
ビットレートとか読み込める文字数を観測時刻の推定
- Parameters
-
receive_time[in] 最後にシリアルからデータを受け取った時間 readnum[in] オドメトリなどのデータセットを受け取った回数 wp[in] データ復元をできなかった残り文字数
Definition at line 357 of file odometry.c.
Variable Documentation
| CSptr g_BL |
Definition at line 63 of file odometry.c.
| CSptr g_BS |
Definition at line 61 of file odometry.c.
| ErrorState g_error_state |
Definition at line 66 of file odometry.c.
| double g_estimated_delay = 0 |
Definition at line 56 of file odometry.c.
| CSptr g_FS |
Definition at line 62 of file odometry.c.
| CSptr g_GL |
Definition at line 58 of file odometry.c.
| double g_interval |
Definition at line 53 of file odometry.c.
| CSptr g_LC |
Definition at line 60 of file odometry.c.
| Odometry g_odometry |
Definition at line 65 of file odometry.c.
| double g_offset |
Definition at line 54 of file odometry.c.
| int g_offset_point |
Definition at line 55 of file odometry.c.
| CSptr g_SP |
Definition at line 59 of file odometry.c.