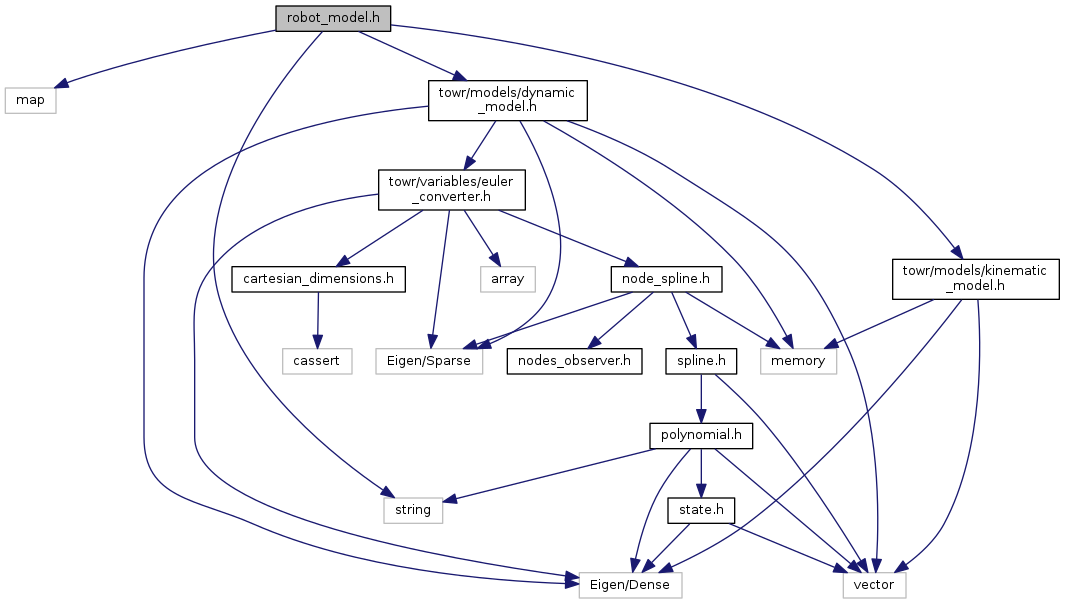
#include <map>#include <string>#include <towr/models/dynamic_model.h>#include <towr/models/kinematic_model.h>
Include dependency graph for robot_model.h:
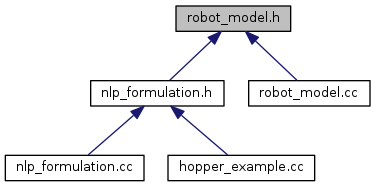
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | towr::RobotModel |
| Base class for robot specific kinematics and dynamics. More... | |
Namespaces | |
| towr | |
Variables | |
| static const std::map< RobotModel::Robot, std::string > | towr::robot_names |