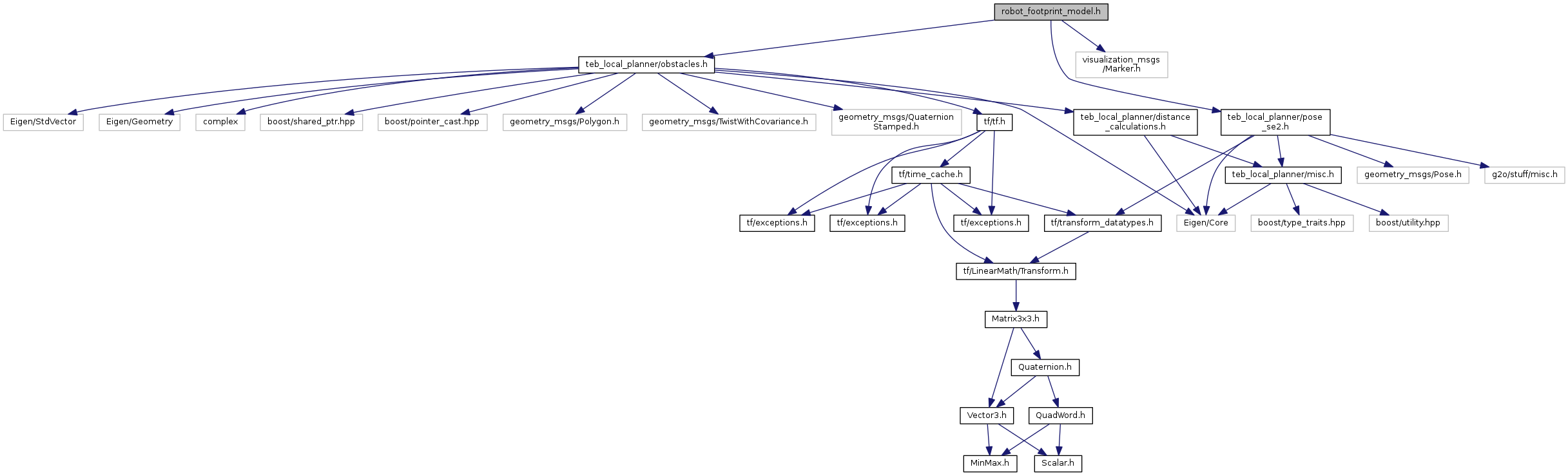
#include <teb_local_planner/pose_se2.h>#include <teb_local_planner/obstacles.h>#include <visualization_msgs/Marker.h>
Include dependency graph for robot_footprint_model.h:
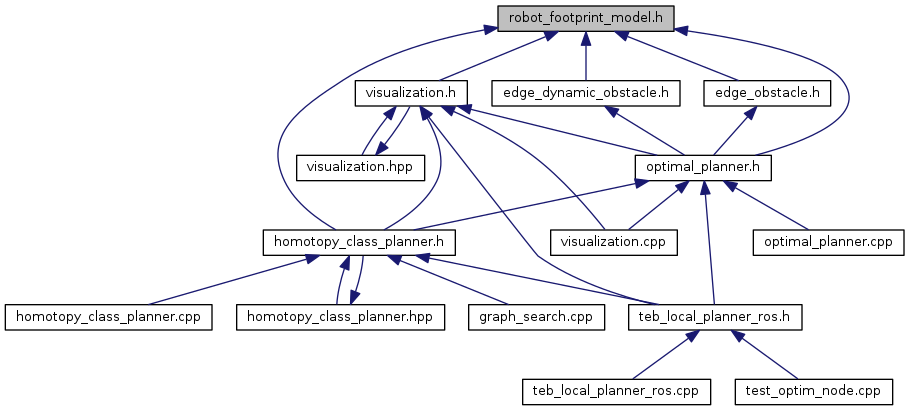
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | teb_local_planner::BaseRobotFootprintModel |
| Abstract class that defines the interface for robot footprint/contour models. More... | |
| class | teb_local_planner::CircularRobotFootprint |
| Class that defines the a robot of circular shape. More... | |
| class | teb_local_planner::LineRobotFootprint |
| Class that approximates the robot with line segment (zero-width) More... | |
| class | teb_local_planner::PointRobotFootprint |
| class | teb_local_planner::PolygonRobotFootprint |
| Class that approximates the robot with a closed polygon. More... | |
| class | teb_local_planner::TwoCirclesRobotFootprint |
| Class that approximates the robot with two shifted circles. More... | |
Namespaces | |
| teb_local_planner | |
Typedefs | |
| typedef boost::shared_ptr< const BaseRobotFootprintModel > | teb_local_planner::RobotFootprintModelConstPtr |
| Abbrev. for shared obstacle const pointers. More... | |
| typedef boost::shared_ptr< BaseRobotFootprintModel > | teb_local_planner::RobotFootprintModelPtr |
| Abbrev. for shared obstacle pointers. More... | |