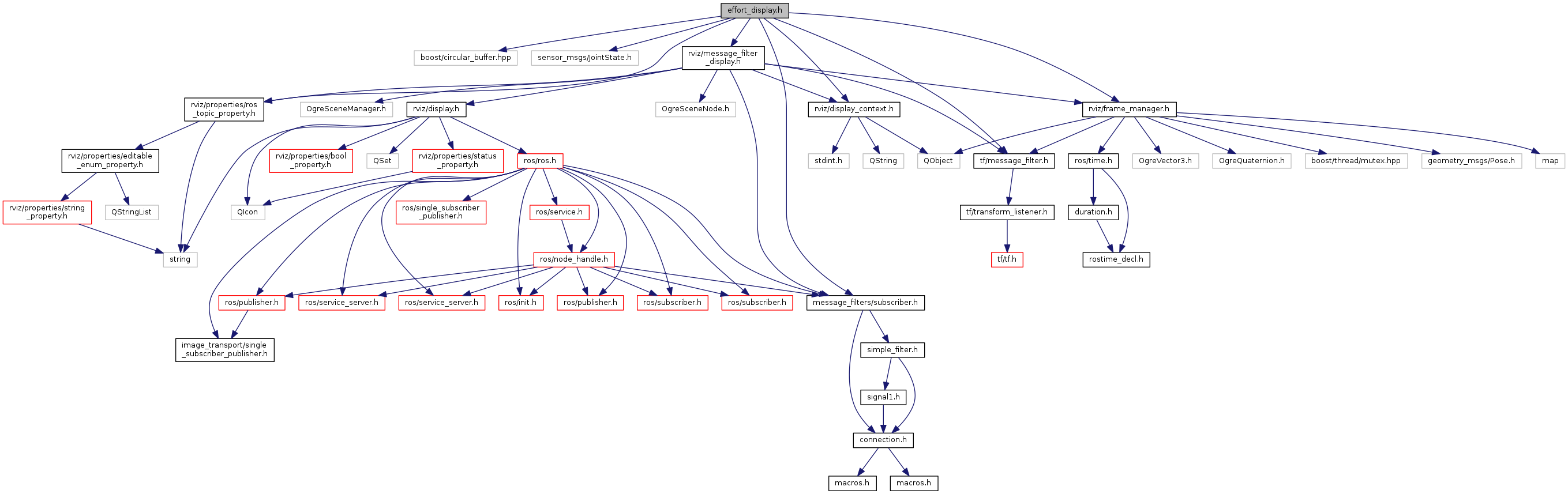
#include <boost/circular_buffer.hpp>#include <sensor_msgs/JointState.h>#include <rviz/message_filter_display.h>#include <message_filters/subscriber.h>#include <tf/message_filter.h>#include "rviz/display_context.h"#include "rviz/frame_manager.h"#include "rviz/properties/ros_topic_property.h"
Include dependency graph for effort_display.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | rviz::EffortDisplay |
| class | rviz::JointInfo |
| class | tf::MessageFilterJointState |
| class | rviz::MessageFilterJointStateDisplay |
| Display subclass using a tf::MessageFilter, templated on the ROS message type. More... | |
Namespaces | |
| Ogre | |
| rviz | |
| tf | |
| urdf | |
Macros | |
| #define | TF_MESSAGEFILTER_DEBUG(fmt, ...) ROS_DEBUG_NAMED("message_filter", "MessageFilter [target=%s]: " fmt, getTargetFramesString().c_str(), __VA_ARGS__) |
| #define | TF_MESSAGEFILTER_WARN(fmt, ...) ROS_WARN_NAMED("message_filter", "MessageFilter [target=%s]: " fmt, getTargetFramesString().c_str(), __VA_ARGS__) |
Typedefs | |
| typedef std::set< JointInfo * > | rviz::S_JointInfo |
| typedef std::vector< std::string > | rviz::V_string |
Macro Definition Documentation
| #define TF_MESSAGEFILTER_DEBUG | ( | fmt, | |
| ... | |||
| ) | ROS_DEBUG_NAMED("message_filter", "MessageFilter [target=%s]: " fmt, getTargetFramesString().c_str(), __VA_ARGS__) |
Definition at line 38 of file effort_display.h.
| #define TF_MESSAGEFILTER_WARN | ( | fmt, | |
| ... | |||
| ) | ROS_WARN_NAMED("message_filter", "MessageFilter [target=%s]: " fmt, getTargetFramesString().c_str(), __VA_ARGS__) |
Definition at line 44 of file effort_display.h.