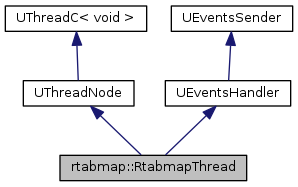
#include <RtabmapThread.h>
|
| enum | State {
kStateInit,
kStateDetecting,
kStateReseting,
kStateClose,
kStateChangingParameters,
kStateDumpingMemory,
kStateDumpingPrediction,
kStateExportingDOTGraph,
kStateExportingPoses,
kStateCleanDataBuffer,
kStatePublishingMap,
kStateTriggeringMap,
kStateSettingGoal,
kStateCancellingGoal,
kStateLabelling
} |
| |
| enum | Priority {
kPLow,
kPBelowNormal,
kPNormal,
kPAboveNormal,
kPRealTime
} |
| |
| typedef THREAD_HANDLE | Handle |
| |
| typedef THREAD_HANDLE | Handle |
| |
| typedef void(* | Handler) () |
| |
| typedef void(* | Handler) () |
| |
|
| void | clearBufferedData () |
| |
| void | close (bool databaseSaved, const std::string &databasePath="") |
| |
| void | createIntermediateNodes (bool enabled) |
| |
| bool | getCreateIntermediateNodes () const |
| |
| unsigned int | getDataBufferSize () const |
| |
| float | getDetectorRate () const |
| |
| | RtabmapThread (Rtabmap *rtabmap) |
| |
| void | setDataBufferSize (unsigned int bufferSize) |
| |
| void | setDetectorRate (float rate) |
| |
| virtual | ~RtabmapThread () |
| |
| Handle | getThreadHandle () const |
| |
| unsigned long | getThreadId () const |
| |
| bool | isCreating () const |
| |
| bool | isIdle () const |
| |
| bool | isKilled () const |
| |
| bool | isRunning () const |
| |
| void | join (bool killFirst=false) |
| |
| void | kill () |
| |
| void | setAffinity (int cpu=0) |
| |
| void | setPriority (Priority priority) |
| |
| void | start () |
| |
| | UThread (Priority priority=kPNormal) |
| |
| virtual | ~UThread () |
| |
| int | Create (Handle *const &H=0, const bool &CreateDetached=false, const unsigned int &StackSize=0, const bool &CancelEnable=false, const bool &CancelAsync=false) const |
| |
| int | Create (Handle *const &H=0, const bool &CreateDetached=false, const unsigned int &StackSize=0, const bool &CancelEnable=false, const bool &CancelAsync=false) const |
| |
| int | Create (unsigned long &ThreadId, Handle *const &H=0, const bool &CreateDetached=false, const unsigned int &StackSize=0, const bool &CancelEnable=false, const bool &CancelAsync=false) const |
| |
| int | Create (unsigned long &ThreadId, Handle *const &H=0, const bool &CreateDetached=false, const unsigned int &StackSize=0, const bool &CancelEnable=false, const bool &CancelAsync=false) const |
| |
| virtual | ~UThreadC () |
| |
| virtual | ~UThreadC () |
| |
 Public Member Functions inherited from UEventsHandler Public Member Functions inherited from UEventsHandler |
| void | registerToEventsManager () |
| |
| void | unregisterFromEventsManager () |
| |
| | UEventsSender () |
| |
| virtual | ~UEventsSender () |
| |
|
| static unsigned long | currentThreadId () |
| |
| static int | Create (const Handler &Function, Handle *const &H=0, const bool &CreateDetached=false, const unsigned int &StackSize=0, const bool &CancelEnable=false, const bool &CancelAsync=false) |
| |
| static int | Create (const Handler &Function, Handle *const &H=0, const bool &CreateDetached=false, const unsigned int &StackSize=0, const bool &CancelEnable=false, const bool &CancelAsync=false) |
| |
| static int | Detach (Handle H) |
| |
| static int | Detach (const Handle &H) |
| |
| static int | Join (const Handle &H) |
| |
| static int | Join (Handle H) |
| |
| static int | Kill (Handle H) |
| |
| static int | Kill (const Handle &H) |
| |
| static void | Exit () |
| |
| static void | Exit () |
| |
| static Handle | Self () |
| |
| static int | Self () |
| |
| static void | TestCancel () |
| |
| static void | TestCancel () |
| |
Definition at line 51 of file RtabmapThread.h.
| Enumerator |
|---|
| kStateInit |
|
| kStateDetecting |
|
| kStateReseting |
|
| kStateClose |
|
| kStateChangingParameters |
|
| kStateDumpingMemory |
|
| kStateDumpingPrediction |
|
| kStateExportingDOTGraph |
|
| kStateExportingPoses |
|
| kStateCleanDataBuffer |
|
| kStatePublishingMap |
|
| kStateTriggeringMap |
|
| kStateSettingGoal |
|
| kStateCancellingGoal |
|
| kStateLabelling |
|
Definition at line 56 of file RtabmapThread.h.
| rtabmap::RtabmapThread::RtabmapThread |
( |
Rtabmap * |
rtabmap | ) |
|
| rtabmap::RtabmapThread::~RtabmapThread |
( |
| ) |
|
|
virtual |
| void rtabmap::RtabmapThread::addData |
( |
const OdometryEvent & |
odomEvent | ) |
|
|
private |
| void rtabmap::RtabmapThread::clearBufferedData |
( |
| ) |
|
| void rtabmap::RtabmapThread::close |
( |
bool |
databaseSaved, |
|
|
const std::string & |
databasePath = "" |
|
) |
| |
Close rtabmap. This will delete rtabmap object if set.
- Parameters
-
| databaseSaved | true=database saved, false=database discarded. |
| databasePath | output database file name, ignored if Db/Sqlite3InMemory=false (opened database is then overwritten). |
Definition at line 118 of file RtabmapThread.cpp.
| void rtabmap::RtabmapThread::createIntermediateNodes |
( |
bool |
enabled | ) |
|
| bool rtabmap::RtabmapThread::getCreateIntermediateNodes |
( |
| ) |
const |
|
inline |
| unsigned int rtabmap::RtabmapThread::getDataBufferSize |
( |
| ) |
const |
|
inline |
| float rtabmap::RtabmapThread::getDetectorRate |
( |
| ) |
const |
|
inline |
| bool rtabmap::RtabmapThread::handleEvent |
( |
UEvent * |
event | ) |
|
|
protectedvirtual |
Method called by the UEventsManager to handle an event. Important : this method must do a minimum of work because the faster the dispatching loop is done; the faster the events are received. If a handling function takes too much time, the events list can grow faster than it is emptied. The event can be modified.
- Returns
- "true" to notify UEventsManager that this handler took ownership of the event (meaning it must delete it). The event will not be dispatched to next handlers.
-
"false" to let event be dispatched to next handlers (default behavior). UEventsManager will take care of deleting the event.
Implements UEventsHandler.
Definition at line 316 of file RtabmapThread.cpp.
| void rtabmap::RtabmapThread::mainLoop |
( |
| ) |
|
|
privatevirtual |
| void rtabmap::RtabmapThread::mainLoopBegin |
( |
| ) |
|
|
privatevirtual |
| void rtabmap::RtabmapThread::mainLoopKill |
( |
| ) |
|
|
privatevirtual |
Virtual method mainLoopKill(). User can implement this function to add a behavior before the thread is killed. When this function is called, the state of the thread is set to kSKilled. It is useful to wake up a sleeping thread to finish his loop and to avoid a deadlock.
Reimplemented from UThread.
Definition at line 180 of file RtabmapThread.cpp.
| void rtabmap::RtabmapThread::process |
( |
| ) |
|
|
private |
| void rtabmap::RtabmapThread::publishMap |
( |
bool |
optimized, |
|
|
bool |
full, |
|
|
bool |
graphOnly |
|
) |
| const |
|
private |
| void rtabmap::RtabmapThread::setDataBufferSize |
( |
unsigned int |
bufferSize | ) |
|
| void rtabmap::RtabmapThread::setDetectorRate |
( |
float |
rate | ) |
|
| bool rtabmap::RtabmapThread::_createIntermediateNodes |
|
private |
| unsigned int rtabmap::RtabmapThread::_dataBufferMaxSize |
|
private |
| UMutex rtabmap::RtabmapThread::_dataMutex |
|
private |
| UTimer* rtabmap::RtabmapThread::_frameRateTimer |
|
private |
| std::list<double> rtabmap::RtabmapThread::_newMapEvents |
|
private |
| bool rtabmap::RtabmapThread::_paused |
|
private |
| double rtabmap::RtabmapThread::_previousStamp |
|
private |
| float rtabmap::RtabmapThread::_rate |
|
private |
| Rtabmap* rtabmap::RtabmapThread::_rtabmap |
|
private |
| std::queue<State> rtabmap::RtabmapThread::_state |
|
private |
| UMutex rtabmap::RtabmapThread::_stateMutex |
|
private |
| cv::Mat rtabmap::RtabmapThread::_userData |
|
private |
| UMutex rtabmap::RtabmapThread::_userDataMutex |
|
private |
| cv::Mat rtabmap::RtabmapThread::covariance_ |
|
private |
The documentation for this class was generated from the following files: