#include <CameraThread.h>
|
| Camera * | camera () |
| |
| | CameraThread (Camera *camera, const ParametersMap ¶meters=ParametersMap()) |
| |
| void | disableBilateralFiltering () |
| |
| void | enableBilateralFiltering (float sigmaS, float sigmaR) |
| |
| bool | isCapturing () const |
| |
| bool | isPaused () const |
| |
| void | postUpdate (SensorData *data, CameraInfo *info=0) const |
| |
| void | setColorOnly (bool colorOnly) |
| |
| void | setDistortionModel (const std::string &path) |
| |
| void | setImageDecimation (int decimation) |
| |
| void | setImageRate (float imageRate) |
| |
| void | setMirroringEnabled (bool enabled) |
| |
| void | setScanFromDepth (bool enabled, int decimation=4, float maxDepth=4.0f, float voxelSize=0.0f, int normalsK=0, int normalsRadius=0.0f) |
| |
| void | setStereoExposureCompensation (bool enabled) |
| |
| void | setStereoToDepth (bool enabled) |
| |
| virtual | ~CameraThread () |
| |
| Handle | getThreadHandle () const |
| |
| unsigned long | getThreadId () const |
| |
| bool | isCreating () const |
| |
| bool | isIdle () const |
| |
| bool | isKilled () const |
| |
| bool | isRunning () const |
| |
| void | join (bool killFirst=false) |
| |
| void | kill () |
| |
| void | setAffinity (int cpu=0) |
| |
| void | setPriority (Priority priority) |
| |
| void | start () |
| |
| | UThread (Priority priority=kPNormal) |
| |
| virtual | ~UThread () |
| |
| int | Create (Handle *const &H=0, const bool &CreateDetached=false, const unsigned int &StackSize=0, const bool &CancelEnable=false, const bool &CancelAsync=false) const |
| |
| int | Create (Handle *const &H=0, const bool &CreateDetached=false, const unsigned int &StackSize=0, const bool &CancelEnable=false, const bool &CancelAsync=false) const |
| |
| int | Create (unsigned long &ThreadId, Handle *const &H=0, const bool &CreateDetached=false, const unsigned int &StackSize=0, const bool &CancelEnable=false, const bool &CancelAsync=false) const |
| |
| int | Create (unsigned long &ThreadId, Handle *const &H=0, const bool &CreateDetached=false, const unsigned int &StackSize=0, const bool &CancelEnable=false, const bool &CancelAsync=false) const |
| |
| virtual | ~UThreadC () |
| |
| virtual | ~UThreadC () |
| |
| | UEventsSender () |
| |
| virtual | ~UEventsSender () |
| |
|
| enum | Priority {
kPLow,
kPBelowNormal,
kPNormal,
kPAboveNormal,
kPRealTime
} |
| |
| typedef THREAD_HANDLE | Handle |
| |
| typedef THREAD_HANDLE | Handle |
| |
| typedef void(* | Handler) () |
| |
| typedef void(* | Handler) () |
| |
| static unsigned long | currentThreadId () |
| |
| static int | Create (const Handler &Function, Handle *const &H=0, const bool &CreateDetached=false, const unsigned int &StackSize=0, const bool &CancelEnable=false, const bool &CancelAsync=false) |
| |
| static int | Create (const Handler &Function, Handle *const &H=0, const bool &CreateDetached=false, const unsigned int &StackSize=0, const bool &CancelEnable=false, const bool &CancelAsync=false) |
| |
| static int | Detach (Handle H) |
| |
| static int | Detach (const Handle &H) |
| |
| static int | Join (const Handle &H) |
| |
| static int | Join (Handle H) |
| |
| static int | Kill (Handle H) |
| |
| static int | Kill (const Handle &H) |
| |
| | UThreadC () |
| |
| | UThreadC () |
| |
| void | post (UEvent *event, bool async=true) const |
| |
| static void | Exit () |
| |
| static void | Exit () |
| |
| static Handle | Self () |
| |
| static int | Self () |
| |
| static void | TestCancel () |
| |
| static void | TestCancel () |
| |
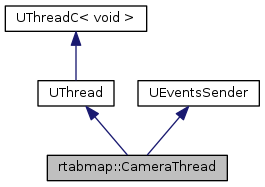
Class CameraThread
Definition at line 53 of file CameraThread.h.
| rtabmap::CameraThread::~CameraThread |
( |
| ) |
|
|
virtual |
| Camera* rtabmap::CameraThread::camera |
( |
| ) |
|
|
inline |
| void rtabmap::CameraThread::disableBilateralFiltering |
( |
| ) |
|
|
inline |
| void rtabmap::CameraThread::enableBilateralFiltering |
( |
float |
sigmaS, |
|
|
float |
sigmaR |
|
) |
| |
| bool rtabmap::CameraThread::isCapturing |
( |
| ) |
const |
|
inline |
| bool rtabmap::CameraThread::isPaused |
( |
| ) |
const |
|
inline |
| void rtabmap::CameraThread::mainLoop |
( |
| ) |
|
|
privatevirtual |
| void rtabmap::CameraThread::mainLoopBegin |
( |
| ) |
|
|
privatevirtual |
| void rtabmap::CameraThread::mainLoopKill |
( |
| ) |
|
|
privatevirtual |
Virtual method mainLoopKill(). User can implement this function to add a behavior before the thread is killed. When this function is called, the state of the thread is set to kSKilled. It is useful to wake up a sleeping thread to finish his loop and to avoid a deadlock.
Reimplemented from UThread.
Definition at line 146 of file CameraThread.cpp.
| void rtabmap::CameraThread::setColorOnly |
( |
bool |
colorOnly | ) |
|
|
inline |
| void rtabmap::CameraThread::setDistortionModel |
( |
const std::string & |
path | ) |
|
| void rtabmap::CameraThread::setImageDecimation |
( |
int |
decimation | ) |
|
|
inline |
| void rtabmap::CameraThread::setImageRate |
( |
float |
imageRate | ) |
|
| void rtabmap::CameraThread::setMirroringEnabled |
( |
bool |
enabled | ) |
|
|
inline |
| void rtabmap::CameraThread::setScanFromDepth |
( |
bool |
enabled, |
|
|
int |
decimation = 4, |
|
|
float |
maxDepth = 4.0f, |
|
|
float |
voxelSize = 0.0f, |
|
|
int |
normalsK = 0, |
|
|
int |
normalsRadius = 0.0f |
|
) |
| |
|
inline |
| void rtabmap::CameraThread::setStereoExposureCompensation |
( |
bool |
enabled | ) |
|
|
inline |
| void rtabmap::CameraThread::setStereoToDepth |
( |
bool |
enabled | ) |
|
|
inline |
| bool rtabmap::CameraThread::_bilateralFiltering |
|
private |
| float rtabmap::CameraThread::_bilateralSigmaR |
|
private |
| float rtabmap::CameraThread::_bilateralSigmaS |
|
private |
| Camera* rtabmap::CameraThread::_camera |
|
private |
| bool rtabmap::CameraThread::_colorOnly |
|
private |
| int rtabmap::CameraThread::_imageDecimation |
|
private |
| bool rtabmap::CameraThread::_mirroring |
|
private |
| int rtabmap::CameraThread::_scanDecimation |
|
private |
| bool rtabmap::CameraThread::_scanFromDepth |
|
private |
| float rtabmap::CameraThread::_scanMaxDepth |
|
private |
| float rtabmap::CameraThread::_scanMinDepth |
|
private |
| int rtabmap::CameraThread::_scanNormalsK |
|
private |
| float rtabmap::CameraThread::_scanNormalsRadius |
|
private |
| float rtabmap::CameraThread::_scanVoxelSize |
|
private |
| bool rtabmap::CameraThread::_stereoExposureCompensation |
|
private |
| bool rtabmap::CameraThread::_stereoToDepth |
|
private |
The documentation for this class was generated from the following files:
 Public Member Functions inherited from UThread
Public Member Functions inherited from UThread