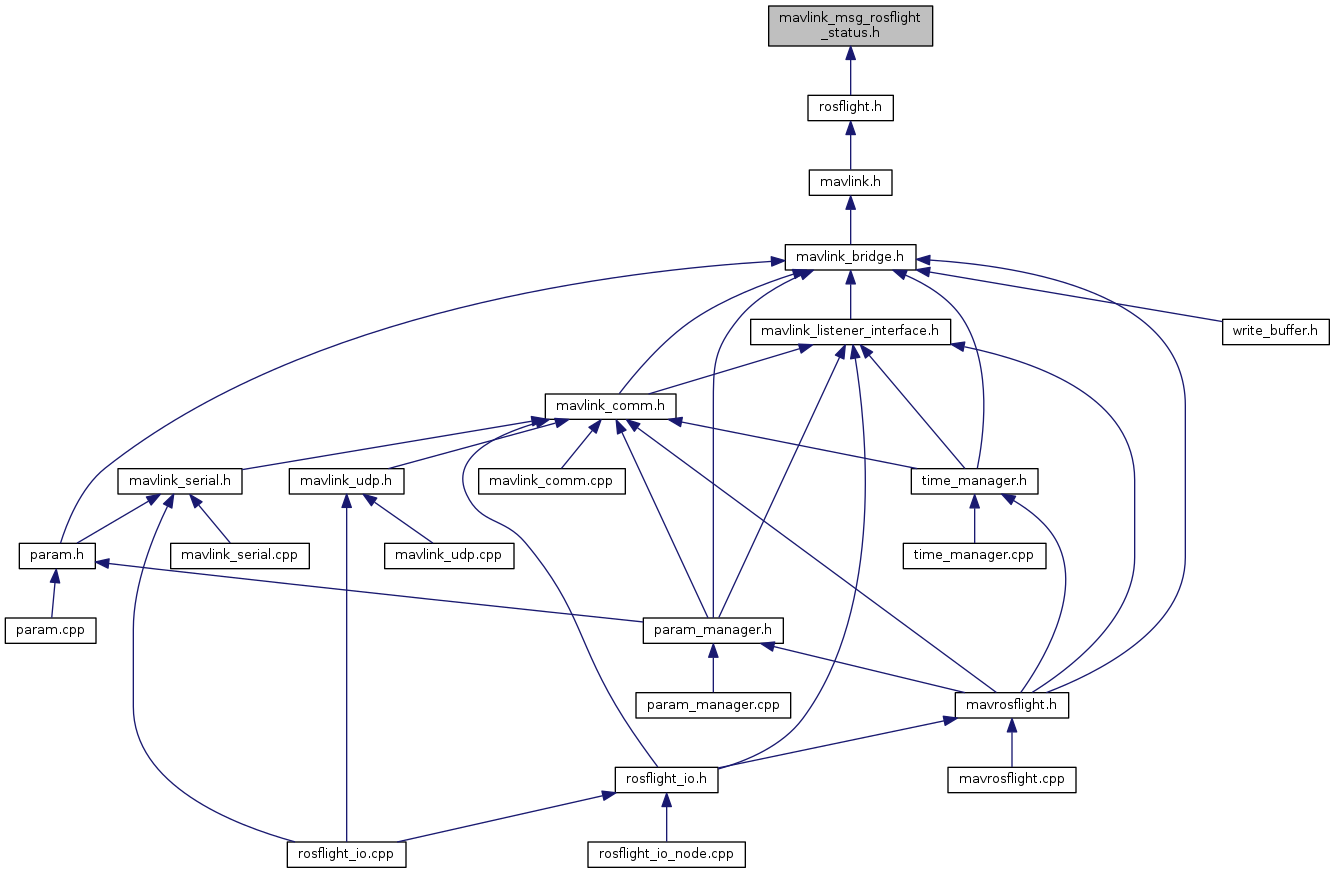
Go to the source code of this file.
Classes | |
| struct | __mavlink_rosflight_status_t |
Macros | |
| #define | MAVLINK_MESSAGE_INFO_ROSFLIGHT_STATUS |
| #define | MAVLINK_MSG_ID_191_CRC 183 |
| #define | MAVLINK_MSG_ID_191_LEN 10 |
| #define | MAVLINK_MSG_ID_ROSFLIGHT_STATUS 191 |
| #define | MAVLINK_MSG_ID_ROSFLIGHT_STATUS_CRC 183 |
| #define | MAVLINK_MSG_ID_ROSFLIGHT_STATUS_LEN 10 |
Typedefs | |
| typedef struct __mavlink_rosflight_status_t | mavlink_rosflight_status_t |
Functions | |
| static void | mavlink_msg_rosflight_status_decode (const mavlink_message_t *msg, mavlink_rosflight_status_t *rosflight_status) |
| Decode a rosflight_status message into a struct. More... | |
| static uint16_t | mavlink_msg_rosflight_status_encode (uint8_t system_id, uint8_t component_id, mavlink_message_t *msg, const mavlink_rosflight_status_t *rosflight_status) |
| Encode a rosflight_status struct. More... | |
| static uint16_t | mavlink_msg_rosflight_status_encode_chan (uint8_t system_id, uint8_t component_id, uint8_t chan, mavlink_message_t *msg, const mavlink_rosflight_status_t *rosflight_status) |
| Encode a rosflight_status struct on a channel. More... | |
| static uint8_t | mavlink_msg_rosflight_status_get_armed (const mavlink_message_t *msg) |
| Send a rosflight_status message. More... | |
| static uint8_t | mavlink_msg_rosflight_status_get_control_mode (const mavlink_message_t *msg) |
| Get field control_mode from rosflight_status message. More... | |
| static uint8_t | mavlink_msg_rosflight_status_get_error_code (const mavlink_message_t *msg) |
| Get field error_code from rosflight_status message. More... | |
| static uint8_t | mavlink_msg_rosflight_status_get_failsafe (const mavlink_message_t *msg) |
| Get field failsafe from rosflight_status message. More... | |
| static int16_t | mavlink_msg_rosflight_status_get_loop_time_us (const mavlink_message_t *msg) |
| Get field loop_time_us from rosflight_status message. More... | |
| static int16_t | mavlink_msg_rosflight_status_get_num_errors (const mavlink_message_t *msg) |
| Get field num_errors from rosflight_status message. More... | |
| static uint8_t | mavlink_msg_rosflight_status_get_offboard (const mavlink_message_t *msg) |
| Get field offboard from rosflight_status message. More... | |
| static uint8_t | mavlink_msg_rosflight_status_get_rc_override (const mavlink_message_t *msg) |
| Get field rc_override from rosflight_status message. More... | |
| static uint16_t | mavlink_msg_rosflight_status_pack (uint8_t system_id, uint8_t component_id, mavlink_message_t *msg, uint8_t armed, uint8_t failsafe, uint8_t rc_override, uint8_t offboard, uint8_t error_code, uint8_t control_mode, int16_t num_errors, int16_t loop_time_us) |
| Pack a rosflight_status message. More... | |
| static uint16_t | mavlink_msg_rosflight_status_pack_chan (uint8_t system_id, uint8_t component_id, uint8_t chan, mavlink_message_t *msg, uint8_t armed, uint8_t failsafe, uint8_t rc_override, uint8_t offboard, uint8_t error_code, uint8_t control_mode, int16_t num_errors, int16_t loop_time_us) |
| Pack a rosflight_status message on a channel. More... | |
Macro Definition Documentation
| #define MAVLINK_MESSAGE_INFO_ROSFLIGHT_STATUS |
Definition at line 25 of file mavlink_msg_rosflight_status.h.
| #define MAVLINK_MSG_ID_191_CRC 183 |
Definition at line 21 of file mavlink_msg_rosflight_status.h.
| #define MAVLINK_MSG_ID_191_LEN 10 |
Definition at line 18 of file mavlink_msg_rosflight_status.h.
| #define MAVLINK_MSG_ID_ROSFLIGHT_STATUS 191 |
Definition at line 3 of file mavlink_msg_rosflight_status.h.
| #define MAVLINK_MSG_ID_ROSFLIGHT_STATUS_CRC 183 |
Definition at line 20 of file mavlink_msg_rosflight_status.h.
| #define MAVLINK_MSG_ID_ROSFLIGHT_STATUS_LEN 10 |
Definition at line 17 of file mavlink_msg_rosflight_status.h.
Typedef Documentation
| typedef struct __mavlink_rosflight_status_t mavlink_rosflight_status_t |
Function Documentation
|
inlinestatic |
Decode a rosflight_status message into a struct.
- Parameters
-
msg The message to decode rosflight_status C-struct to decode the message contents into
Definition at line 363 of file mavlink_msg_rosflight_status.h.
|
inlinestatic |
Encode a rosflight_status struct.
- Parameters
-
system_id ID of this system component_id ID of this component (e.g. 200 for IMU) msg The MAVLink message to compress the data into rosflight_status C-struct to read the message contents from
Definition at line 155 of file mavlink_msg_rosflight_status.h.
|
inlinestatic |
Encode a rosflight_status struct on a channel.
- Parameters
-
system_id ID of this system component_id ID of this component (e.g. 200 for IMU) chan The MAVLink channel this message will be sent over msg The MAVLink message to compress the data into rosflight_status C-struct to read the message contents from
Definition at line 169 of file mavlink_msg_rosflight_status.h.
|
inlinestatic |
Send a rosflight_status message.
- Parameters
-
chan MAVLink channel to send the message armed failsafe rc_override offboard error_code control_mode num_errors loop_time_us Get field armed from rosflight_status message
- Returns
Definition at line 282 of file mavlink_msg_rosflight_status.h.
|
inlinestatic |
Get field control_mode from rosflight_status message.
- Returns
Definition at line 332 of file mavlink_msg_rosflight_status.h.
|
inlinestatic |
Get field error_code from rosflight_status message.
- Returns
Definition at line 322 of file mavlink_msg_rosflight_status.h.
|
inlinestatic |
Get field failsafe from rosflight_status message.
- Returns
Definition at line 292 of file mavlink_msg_rosflight_status.h.
|
inlinestatic |
Get field loop_time_us from rosflight_status message.
- Returns
Definition at line 352 of file mavlink_msg_rosflight_status.h.
|
inlinestatic |
Get field num_errors from rosflight_status message.
- Returns
Definition at line 342 of file mavlink_msg_rosflight_status.h.
|
inlinestatic |
Get field offboard from rosflight_status message.
- Returns
Definition at line 312 of file mavlink_msg_rosflight_status.h.
|
inlinestatic |
Get field rc_override from rosflight_status message.
- Returns
Definition at line 302 of file mavlink_msg_rosflight_status.h.
|
inlinestatic |
Pack a rosflight_status message.
- Parameters
-
system_id ID of this system component_id ID of this component (e.g. 200 for IMU) msg The MAVLink message to compress the data into armed failsafe rc_override offboard error_code control_mode num_errors loop_time_us
- Returns
- length of the message in bytes (excluding serial stream start sign)
Definition at line 56 of file mavlink_msg_rosflight_status.h.
|
inlinestatic |
Pack a rosflight_status message on a channel.
- Parameters
-
system_id ID of this system component_id ID of this component (e.g. 200 for IMU) chan The MAVLink channel this message will be sent over msg The MAVLink message to compress the data into armed failsafe rc_override offboard error_code control_mode num_errors loop_time_us
- Returns
- length of the message in bytes (excluding serial stream start sign)
Definition at line 109 of file mavlink_msg_rosflight_status.h.