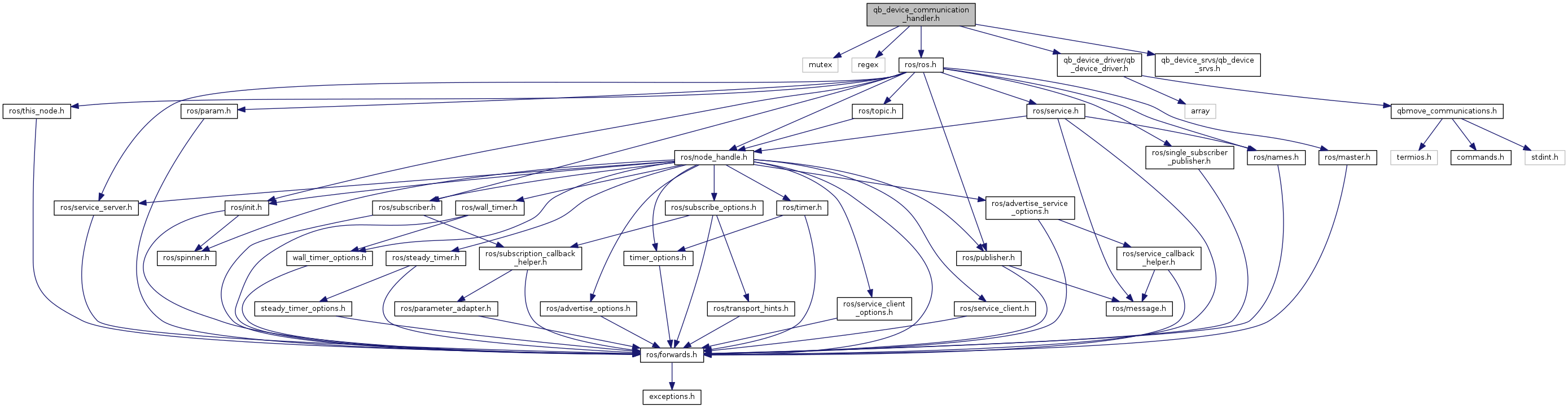
#include <mutex>#include <regex>#include <ros/ros.h>#include <qb_device_driver/qb_device_driver.h>#include <qb_device_srvs/qb_device_srvs.h>
Include dependency graph for qb_device_communication_handler.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | qb_device_communication_handler::qbDeviceCommunicationHandler |
| The Communication Handler class is aimed to instantiate a ROS node which provides several ROS services to communicate with one - or many - qbrobotics devices connected to the ROS ecosystem. More... | |
Namespaces | |
| qb_device_communication_handler | |