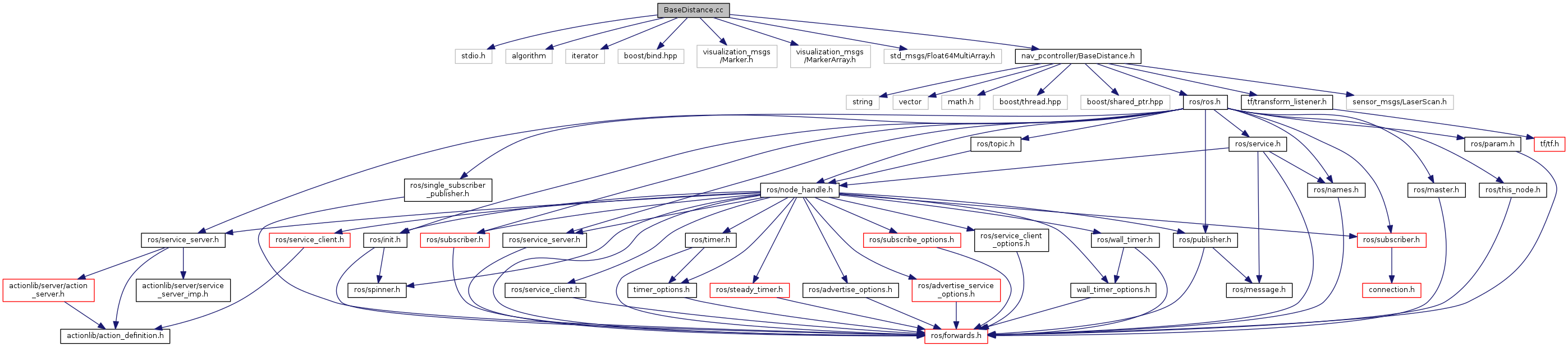
#include <stdio.h>#include <algorithm>#include <iterator>#include <boost/bind.hpp>#include <visualization_msgs/Marker.h>#include <visualization_msgs/MarkerArray.h>#include <std_msgs/Float64MultiArray.h>#include "nav_pcontroller/BaseDistance.h"
Include dependency graph for BaseDistance.cc:
Go to the source code of this file.
Namespaces | |
| tf | |
Macros | |
| #define | CLAMP(x, min, max) (x < min) ? min : ((x > max) ? max : x) |
| #define | FRONT 8 |
| #define | LEFT 1 |
| #define | MODE_BRAKING 3 |
| #define | MODE_FREE 0 |
| #define | MODE_HARD_PROJECTING 2 |
| #define | MODE_PROJECTING 1 |
| #define | MODE_PROJECTION_MASK 3 |
| #define | MODE_REPELLING 4 |
| #define | REAR 4 |
| #define | RIGHT 2 |
Typedefs | |
| typedef btMatrix3x3 | tf::Matrix3x3 |
Macro Definition Documentation
Definition at line 404 of file BaseDistance.cc.
| #define FRONT 8 |
Definition at line 310 of file BaseDistance.cc.
| #define LEFT 1 |
Definition at line 307 of file BaseDistance.cc.
| #define MODE_BRAKING 3 |
Definition at line 60 of file BaseDistance.cc.
| #define MODE_FREE 0 |
- Todo:
- : avoid unnecessary computation
write standalone laser_bumper
integrate test debug print about activity
there are a lot of 'new' statements. -> performance problem?
Definition at line 57 of file BaseDistance.cc.
| #define MODE_HARD_PROJECTING 2 |
Definition at line 59 of file BaseDistance.cc.
| #define MODE_PROJECTING 1 |
Definition at line 58 of file BaseDistance.cc.
| #define MODE_PROJECTION_MASK 3 |
Definition at line 62 of file BaseDistance.cc.
| #define MODE_REPELLING 4 |
Definition at line 61 of file BaseDistance.cc.
| #define REAR 4 |
Definition at line 309 of file BaseDistance.cc.
| #define RIGHT 2 |
Definition at line 308 of file BaseDistance.cc.