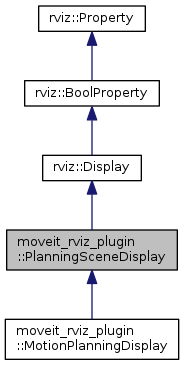
#include <planning_scene_display.h>
Public Member Functions | |
| void | addBackgroundJob (const boost::function< void()> &job, const std::string &name) |
| void | addMainLoopJob (const boost::function< void()> &job) |
| queue the execution of this function for the next time the main update() loop gets called More... | |
| void | clearJobs () |
| remove all queued jobs More... | |
| const std::string | getMoveGroupNS () const |
| const planning_scene_monitor::PlanningSceneMonitorPtr & | getPlanningSceneMonitor () |
| planning_scene_monitor::LockedPlanningSceneRO | getPlanningSceneRO () const |
| get read-only access to planning scene More... | |
| planning_scene_monitor::LockedPlanningSceneRW | getPlanningSceneRW () |
| get write access to planning scene More... | |
| const robot_model::RobotModelConstPtr & | getRobotModel () const |
| virtual void | load (const rviz::Config &config) |
| PlanningSceneDisplay (bool listen_to_planning_scene=true, bool show_scene_robot=true) | |
| void | queueRenderSceneGeometry () |
| virtual void | reset () |
| virtual void | save (rviz::Config config) const |
| void | setLinkColor (const std::string &link_name, const QColor &color) |
| void | spawnBackgroundJob (const boost::function< void()> &job) |
| void | unsetLinkColor (const std::string &link_name) |
| virtual void | update (float wall_dt, float ros_dt) |
| void | waitForAllMainLoopJobs () |
| bool | waitForCurrentRobotState (const ros::Time &t=ros::Time::now()) |
| wait for robot state more recent than t More... | |
| virtual | ~PlanningSceneDisplay () |
 Public Member Functions inherited from rviz::Display Public Member Functions inherited from rviz::Display | |
| virtual void | deleteStatus (const QString &name) |
| void | deleteStatusStd (const std::string &name) |
| Display () | |
| void | emitTimeSignal (ros::Time time) |
| QWidget * | getAssociatedWidget () const |
| PanelDockWidget * | getAssociatedWidgetPanel () |
| virtual QString | getClassId () const |
| Ogre::SceneNode * | getSceneNode () const |
| virtual QVariant | getViewData (int column, int role) const |
| virtual Qt::ItemFlags | getViewFlags (int column) const |
| uint32_t | getVisibilityBits () |
| void | initialize (DisplayContext *context) |
| bool | isEnabled () const |
| void | setAssociatedWidget (QWidget *widget) |
| virtual void | setClassId (const QString &class_id) |
| void | setFixedFrame (const QString &fixed_frame) |
| void | setName (const QString &name) |
| virtual void | setStatus (StatusProperty::Level level, const QString &name, const QString &text) |
| void | setStatusStd (StatusProperty::Level level, const std::string &name, const std::string &text) |
| virtual void | setTopic (const QString &topic, const QString &datatype) |
| void | setVisibilityBits (uint32_t bits) |
| void | unsetVisibilityBits (uint32_t bits) |
| virtual | ~Display () |
| Public Member Functions inherited from rviz::BoolProperty | |
| BoolProperty (const QString &name=QString(), bool default_value=false, const QString &description=QString(), Property *parent=0, const char *changed_slot=0, QObject *receiver=0) | |
| virtual bool | getBool () const |
| virtual bool | getDisableChildren () |
| bool | getDisableChildrenIfFalse () |
| void | setDisableChildrenIfFalse (bool disable) |
| virtual | ~BoolProperty () |
| Public Member Functions inherited from rviz::Property | |
| virtual void | addChild (Property *child, int index=-1) |
| Property * | childAt (int index) const |
| virtual Property * | childAtUnchecked (int index) const |
| virtual void | collapse () |
| bool | contains (Property *possible_child) const |
| virtual QWidget * | createEditor (QWidget *parent, const QStyleOptionViewItem &option) |
| virtual void | expand () |
| virtual QString | getDescription () const |
| virtual bool | getHidden () const |
| virtual QIcon | getIcon () const |
| PropertyTreeModel * | getModel () const |
| virtual QString | getName () const |
| std::string | getNameStd () const |
| Property * | getParent () const |
| virtual bool | getReadOnly () |
| virtual QVariant | getValue () const |
| void | hide () |
| bool | isAncestorOf (Property *possible_child) const |
| virtual void | moveChild (int from_index, int to_index) |
| virtual int | numChildren () const |
| virtual bool | paint (QPainter *painter, const QStyleOptionViewItem &option) const |
| Property (const QString &name=QString(), const QVariant default_value=QVariant(), const QString &description=QString(), Property *parent=0, const char *changed_slot=0, QObject *receiver=0) | |
| virtual void | removeChildren (int start_index=0, int count=-1) |
| int | rowNumberInParent () const |
| virtual void | setDescription (const QString &description) |
| virtual void | setHidden (bool hidden) |
| virtual void | setIcon (const QIcon &icon) |
| void | setModel (PropertyTreeModel *model) |
| void | setParent (Property *new_parent) |
| virtual void | setReadOnly (bool read_only) |
| void | setShouldBeSaved (bool save) |
| virtual bool | setValue (const QVariant &new_value) |
| bool | shouldBeSaved () const |
| void | show () |
| virtual Property * | subProp (const QString &sub_name) |
| Property * | takeChild (Property *child) |
| virtual Property * | takeChildAt (int index) |
| virtual | ~Property () |
Protected Slots | |
| virtual void | changedAttachedBodyColor () |
Protected Member Functions | |
| void | calculateOffsetPosition () |
| Set the scene node's position, given the target frame and the planning frame. More... | |
| void | clearRobotModel () |
| virtual planning_scene_monitor::PlanningSceneMonitorPtr | createPlanningSceneMonitor () |
| void | executeMainLoopJobs () |
| virtual void | fixedFrameChanged () |
| void | loadRobotModel () |
| virtual void | onDisable () |
| virtual void | onEnable () |
| virtual void | onInitialize () |
| virtual void | onRobotModelLoaded () |
| This is an event called by loadRobotModel() in the MainLoop; do not call directly. More... | |
| virtual void | onSceneMonitorReceivedUpdate (planning_scene_monitor::PlanningSceneMonitor::SceneUpdateType update_type) |
| void | renderPlanningScene () |
| void | sceneMonitorReceivedUpdate (planning_scene_monitor::PlanningSceneMonitor::SceneUpdateType update_type) |
| void | setGroupColor (rviz::Robot *robot, const std::string &group_name, const QColor &color) |
| void | setLinkColor (rviz::Robot *robot, const std::string &link_name, const QColor &color) |
| void | unsetAllColors (rviz::Robot *robot) |
| void | unsetGroupColor (rviz::Robot *robot, const std::string &group_name) |
| void | unsetLinkColor (rviz::Robot *robot, const std::string &link_name) |
| virtual void | updateInternal (float wall_dt, float ros_dt) |
| Protected Member Functions inherited from rviz::Display | |
| virtual void | clearStatuses () |
| bool | initialized () const |
| Protected Member Functions inherited from rviz::Property | |
| void | loadValue (const Config &config) |
Private Slots | |
| void | changedMoveGroupNS () |
| void | changedOctreeColorMode () |
| void | changedOctreeRenderMode () |
| void | changedPlanningSceneTopic () |
| void | changedRobotDescription () |
| void | changedRobotSceneAlpha () |
| void | changedSceneAlpha () |
| void | changedSceneColor () |
| void | changedSceneDisplayTime () |
| void | changedSceneEnabled () |
| void | changedSceneName () |
| void | changedSceneRobotCollisionEnabled () |
| void | changedSceneRobotVisualEnabled () |
Additional Inherited Members | |
| Public Slots inherited from rviz::Display | |
| virtual void | onEnableChanged () |
| void | queueRender () |
| void | setEnabled (bool enabled) |
| virtual void | setIcon (const QIcon &icon) |
| Public Slots inherited from rviz::BoolProperty | |
| bool | setBool (bool value) |
| Signals inherited from rviz::Display | |
| void | timeSignal (rviz::Display *display, ros::Time time) |
| Signals inherited from rviz::Property | |
| void | aboutToChange () |
| void | changed () |
| void | childListChanged (Property *this_property) |
Detailed Description
Definition at line 68 of file planning_scene_display.h.
Constructor & Destructor Documentation
| moveit_rviz_plugin::PlanningSceneDisplay::PlanningSceneDisplay | ( | bool | listen_to_planning_scene = true, |
| bool | show_scene_robot = true |
||
| ) |
Definition at line 65 of file planning_scene_display.cpp.
|
virtual |
Definition at line 158 of file planning_scene_display.cpp.
Member Function Documentation
| void moveit_rviz_plugin::PlanningSceneDisplay::addBackgroundJob | ( | const boost::function< void()> & | job, |
| const std::string & | name | ||
| ) |
Queue this function call for execution within the background thread All jobs are queued and processed in order by a single background thread.
Definition at line 215 of file planning_scene_display.cpp.
| void moveit_rviz_plugin::PlanningSceneDisplay::addMainLoopJob | ( | const boost::function< void()> & | job | ) |
queue the execution of this function for the next time the main update() loop gets called
Definition at line 225 of file planning_scene_display.cpp.
|
protected |
Set the scene node's position, given the target frame and the planning frame.
Definition at line 645 of file planning_scene_display.cpp.
|
protectedvirtualslot |
Definition at line 298 of file planning_scene_display.cpp.
|
privateslot |
Definition at line 308 of file planning_scene_display.cpp.
|
privateslot |
Definition at line 384 of file planning_scene_display.cpp.
|
privateslot |
Definition at line 380 of file planning_scene_display.cpp.
|
privateslot |
Definition at line 364 of file planning_scene_display.cpp.
|
privateslot |
Definition at line 314 of file planning_scene_display.cpp.
|
privateslot |
Definition at line 355 of file planning_scene_display.cpp.
|
privateslot |
Definition at line 350 of file planning_scene_display.cpp.
|
privateslot |
Definition at line 303 of file planning_scene_display.cpp.
|
privateslot |
Definition at line 376 of file planning_scene_display.cpp.
|
privateslot |
Definition at line 408 of file planning_scene_display.cpp.
|
privateslot |
Definition at line 320 of file planning_scene_display.cpp.
|
privateslot |
Definition at line 398 of file planning_scene_display.cpp.
|
privateslot |
Definition at line 388 of file planning_scene_display.cpp.
| void moveit_rviz_plugin::PlanningSceneDisplay::clearJobs | ( | ) |
remove all queued jobs
Definition at line 170 of file planning_scene_display.cpp.
|
protected |
This function is used by loadRobotModel() and should only be called in the MainLoop You probably should not call this function directly
Definition at line 492 of file planning_scene_display.cpp.
|
protectedvirtual |
This function constructs a new planning scene. Probably this should be called in a background thread as it may take some time to complete its execution
Definition at line 485 of file planning_scene_display.cpp.
|
protected |
Definition at line 238 of file planning_scene_display.cpp.
|
protectedvirtual |
Reimplemented from rviz::Display.
Reimplemented in moveit_rviz_plugin::MotionPlanningDisplay.
Definition at line 659 of file planning_scene_display.cpp.
| const std::string moveit_rviz_plugin::PlanningSceneDisplay::getMoveGroupNS | ( | ) | const |
Definition at line 265 of file planning_scene_display.cpp.
| const planning_scene_monitor::PlanningSceneMonitorPtr & moveit_rviz_plugin::PlanningSceneDisplay::getPlanningSceneMonitor | ( | ) |
Definition at line 260 of file planning_scene_display.cpp.
| planning_scene_monitor::LockedPlanningSceneRO moveit_rviz_plugin::PlanningSceneDisplay::getPlanningSceneRO | ( | ) | const |
get read-only access to planning scene
Definition at line 288 of file planning_scene_display.cpp.
| planning_scene_monitor::LockedPlanningSceneRW moveit_rviz_plugin::PlanningSceneDisplay::getPlanningSceneRW | ( | ) |
get write access to planning scene
Definition at line 293 of file planning_scene_display.cpp.
| const robot_model::RobotModelConstPtr & moveit_rviz_plugin::PlanningSceneDisplay::getRobotModel | ( | ) | const |
Definition at line 270 of file planning_scene_display.cpp.
|
virtual |
Reimplemented from rviz::Display.
Reimplemented in moveit_rviz_plugin::MotionPlanningDisplay.
Definition at line 632 of file planning_scene_display.cpp.
|
protected |
This function reloads the robot model and reinitializes the PlanningSceneMonitor It can be called either from the Main Loop or from a Background thread
Definition at line 499 of file planning_scene_display.cpp.
|
protectedvirtual |
Reimplemented from rviz::Display.
Reimplemented in moveit_rviz_plugin::MotionPlanningDisplay.
Definition at line 591 of file planning_scene_display.cpp.
|
protectedvirtual |
Reimplemented from rviz::Display.
Reimplemented in moveit_rviz_plugin::MotionPlanningDisplay.
Definition at line 569 of file planning_scene_display.cpp.
|
protectedvirtual |
Reimplemented from rviz::Display.
Reimplemented in moveit_rviz_plugin::MotionPlanningDisplay.
Definition at line 179 of file planning_scene_display.cpp.
|
protectedvirtual |
This is an event called by loadRobotModel() in the MainLoop; do not call directly.
Reimplemented in moveit_rviz_plugin::MotionPlanningDisplay.
Definition at line 532 of file planning_scene_display.cpp.
|
protectedvirtual |
Reimplemented in moveit_rviz_plugin::MotionPlanningDisplay.
Definition at line 558 of file planning_scene_display.cpp.
| void moveit_rviz_plugin::PlanningSceneDisplay::queueRenderSceneGeometry | ( | ) |
Definition at line 604 of file planning_scene_display.cpp.
|
protected |
Definition at line 327 of file planning_scene_display.cpp.
|
virtual |
Reimplemented from rviz::Display.
Reimplemented in moveit_rviz_plugin::MotionPlanningDisplay.
Definition at line 198 of file planning_scene_display.cpp.
|
virtual |
Reimplemented from rviz::Display.
Reimplemented in moveit_rviz_plugin::MotionPlanningDisplay.
Definition at line 637 of file planning_scene_display.cpp.
|
protected |
Definition at line 552 of file planning_scene_display.cpp.
|
protected |
Definition at line 414 of file planning_scene_display.cpp.
| void moveit_rviz_plugin::PlanningSceneDisplay::setLinkColor | ( | const std::string & | link_name, |
| const QColor & | color | ||
| ) |
Definition at line 452 of file planning_scene_display.cpp.
|
protected |
Definition at line 464 of file planning_scene_display.cpp.
| void moveit_rviz_plugin::PlanningSceneDisplay::spawnBackgroundJob | ( | const boost::function< void()> & | job | ) |
Directly spawn a (detached) background thread for execution of this function call Should be used, when order of processing is not relevant / job can run in parallel. Must be used, when job will be blocking. Using addBackgroundJob() in this case will block other queued jobs as well
Definition at line 220 of file planning_scene_display.cpp.
|
protected |
Definition at line 428 of file planning_scene_display.cpp.
|
protected |
Definition at line 438 of file planning_scene_display.cpp.
| void moveit_rviz_plugin::PlanningSceneDisplay::unsetLinkColor | ( | const std::string & | link_name | ) |
Definition at line 458 of file planning_scene_display.cpp.
|
protected |
Definition at line 473 of file planning_scene_display.cpp.
|
virtual |
Reimplemented from rviz::Display.
Reimplemented in moveit_rviz_plugin::MotionPlanningDisplay.
Definition at line 609 of file planning_scene_display.cpp.
|
protectedvirtual |
Reimplemented in moveit_rviz_plugin::MotionPlanningDisplay.
Definition at line 619 of file planning_scene_display.cpp.
| void moveit_rviz_plugin::PlanningSceneDisplay::waitForAllMainLoopJobs | ( | ) |
Definition at line 231 of file planning_scene_display.cpp.
| bool moveit_rviz_plugin::PlanningSceneDisplay::waitForCurrentRobotState | ( | const ros::Time & | t = ros::Time::now() | ) |
wait for robot state more recent than t
Definition at line 281 of file planning_scene_display.cpp.
Member Data Documentation
|
protected |
Definition at line 209 of file planning_scene_display.h.
|
protected |
Definition at line 182 of file planning_scene_display.h.
|
protected |
Definition at line 194 of file planning_scene_display.h.
|
protected |
Definition at line 183 of file planning_scene_display.h.
|
protected |
Definition at line 185 of file planning_scene_display.h.
|
protected |
Definition at line 184 of file planning_scene_display.h.
|
protected |
Definition at line 179 of file planning_scene_display.h.
|
protected |
Definition at line 199 of file planning_scene_display.h.
|
protected |
Definition at line 212 of file planning_scene_display.h.
|
protected |
Definition at line 211 of file planning_scene_display.h.
|
protected |
Definition at line 178 of file planning_scene_display.h.
|
protected |
Definition at line 193 of file planning_scene_display.h.
|
protected |
displays planning scene with everything in it
Definition at line 187 of file planning_scene_display.h.
|
protected |
Definition at line 191 of file planning_scene_display.h.
|
protected |
Definition at line 190 of file planning_scene_display.h.
|
protected |
Definition at line 205 of file planning_scene_display.h.
|
protected |
Definition at line 206 of file planning_scene_display.h.
|
protected |
Definition at line 197 of file planning_scene_display.h.
|
protected |
Definition at line 200 of file planning_scene_display.h.
|
protected |
Definition at line 180 of file planning_scene_display.h.
|
protected |
Definition at line 207 of file planning_scene_display.h.
|
protected |
Definition at line 196 of file planning_scene_display.h.
|
protected |
Definition at line 208 of file planning_scene_display.h.
|
protected |
Definition at line 210 of file planning_scene_display.h.
|
protected |
Definition at line 202 of file planning_scene_display.h.
|
protected |
Definition at line 201 of file planning_scene_display.h.
|
protected |
Definition at line 204 of file planning_scene_display.h.
|
protected |
Definition at line 203 of file planning_scene_display.h.
The documentation for this class was generated from the following files: