#include "libfreenect.h"#include "platform.h"#include <stdio.h>#include <string.h>#include <stdlib.h>#include <math.h>#include <unistd.h>#include <assert.h>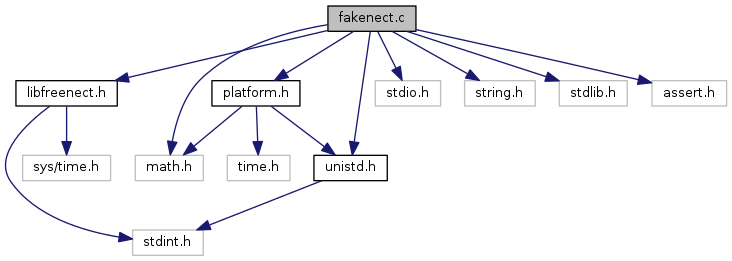
Go to the source code of this file.
Macros | |
| #define | GRAVITY 9.80665 |
Variables | |
| static int | already_warned = 0 |
| static freenect_depth_cb | cur_depth_cb = NULL |
| static freenect_video_cb | cur_rgb_cb = NULL |
| static void * | depth_buffer = NULL |
| static int | depth_running = 0 |
| static freenect_context * | fake_ctx = (freenect_context *)5678 |
| static freenect_device * | fake_dev = (freenect_device *)1234 |
| static FILE * | index_fp = NULL |
| static char * | input_path = NULL |
| static double | playback_prev_time = 0. |
| static double | record_prev_time = 0. |
| static void * | rgb_buffer = NULL |
| static int | rgb_running = 0 |
| static freenect_raw_tilt_state | state = { 0 } |
| static void * | user_ptr = NULL |
Macro Definition Documentation
| #define GRAVITY 9.80665 |
Definition at line 35 of file fakenect.c.
Function Documentation
| int freenect_close_device | ( | freenect_device * | dev | ) |
Closes a device that is currently open
- Parameters
-
dev Device to close
- Returns
- 0 on success
Definition at line 406 of file fakenect.c.
| freenect_frame_mode freenect_find_depth_mode | ( | freenect_resolution | res, |
| freenect_depth_format | fmt | ||
| ) |
Convenience function to return a mode descriptor matching the specified resolution and depth camera pixel format, if one exists.
- Parameters
-
res Resolution desired fmt Pixel format desired
- Returns
- A freenect_frame_mode that matches the arguments specified, if such a valid mode exists; otherwise, an invalid freenect_frame_mode.
Definition at line 284 of file fakenect.c.
| freenect_frame_mode freenect_find_video_mode | ( | freenect_resolution | res, |
| freenect_video_format | fmt | ||
| ) |
Convenience function to return a mode descriptor matching the specified resolution and video camera pixel format, if one exists.
- Parameters
-
res Resolution desired fmt Pixel format desired
- Returns
- A freenect_frame_mode that matches the arguments specified, if such a valid mode exists; otherwise, an invalid freenect_frame_mode.
Definition at line 260 of file fakenect.c.
| freenect_frame_mode freenect_get_current_depth_mode | ( | freenect_device * | dev | ) |
Get the frame descriptor of the current depth mode for the specified freenect device.
- Parameters
-
dev Which device to return the currently-set depth mode for
- Returns
- A freenect_frame_mode describing the current depth mode of the specified device
Definition at line 303 of file fakenect.c.
| freenect_frame_mode freenect_get_current_video_mode | ( | freenect_device * | dev | ) |
Get the frame descriptor of the current video mode for the specified freenect device.
- Parameters
-
dev Which device to return the currently-set video mode for
- Returns
- A freenect_frame_mode describing the current video mode of the specified device
Definition at line 279 of file fakenect.c.
| freenect_frame_mode freenect_get_depth_mode | ( | int | mode_num | ) |
Get the frame descriptor of the nth supported depth mode for the depth camera.
- Parameters
-
mode_num Which of the supported modes to return information about
- Returns
- A freenect_frame_mode describing the nth depth mode
Definition at line 298 of file fakenect.c.
| int freenect_get_depth_mode_count | ( | ) |
Get the number of depth camera modes supported by the driver. This includes both RGB and IR modes.
- Returns
- Number of depth modes supported by the driver
Definition at line 293 of file fakenect.c.
| void freenect_get_mks_accel | ( | freenect_raw_tilt_state * | state, |
| double * | x, | ||
| double * | y, | ||
| double * | z | ||
| ) |
Get the axis-based gravity adjusted accelerometer state, as laid out via the accelerometer data sheet, which is available at
http://www.kionix.com/Product%20Sheets/KXSD9%20Product%20Brief.pdf
- Parameters
-
state State to extract accelerometer data from x Stores X-axis accelerometer state y Stores Y-axis accelerometer state z Stores Z-axis accelerometer state
Definition at line 227 of file fakenect.c.
| double freenect_get_tilt_degs | ( | freenect_raw_tilt_state * | state | ) |
Return the tilt state, in degrees with respect to the horizon
- Parameters
-
state The tilt state struct from a device
- Returns
- Current degree of tilt of the device
Definition at line 211 of file fakenect.c.
| freenect_raw_tilt_state* freenect_get_tilt_state | ( | freenect_device * | dev | ) |
Retrieve the tilt state from a device
- Parameters
-
dev Device to retrieve tilt state from
- Returns
- The tilt state struct of the device
Definition at line 217 of file fakenect.c.
| freenect_tilt_status_code freenect_get_tilt_status | ( | freenect_raw_tilt_state * | state | ) |
Return the movement state of the tilt motor (moving, stopped, etc...)
- Parameters
-
state Raw state struct to get the tilt status code from
- Returns
- Status code of the tilt device. See freenect_tilt_status_code enum for more info.
Definition at line 222 of file fakenect.c.
| void* freenect_get_user | ( | freenect_device * | dev | ) |
Retrieve the pointer to user data from the device struct
- Parameters
-
dev Device from which to get user data
- Returns
- Pointer to user data
Definition at line 360 of file fakenect.c.
| freenect_frame_mode freenect_get_video_mode | ( | int | mode_num | ) |
Get the frame descriptor of the nth supported video mode for the video camera.
- Parameters
-
mode_num Which of the supported modes to return information about
- Returns
- A freenect_frame_mode describing the nth video mode
Definition at line 274 of file fakenect.c.
| int freenect_get_video_mode_count | ( | ) |
Get the number of video camera modes supported by the driver. This includes both RGB and IR modes.
- Returns
- Number of video modes supported by the driver
Definition at line 269 of file fakenect.c.
| int freenect_init | ( | freenect_context ** | ctx, |
| freenect_usb_context * | usb_ctx | ||
| ) |
Initialize a freenect context and do any setup required for platform specific USB libraries.
- Parameters
-
ctx Address of pointer to freenect context struct to allocate and initialize usb_ctx USB context to initialize. Can be NULL if not using multiple contexts.
- Returns
- 0 on success, < 0 on error
Definition at line 327 of file fakenect.c.
| int freenect_num_devices | ( | freenect_context * | ctx | ) |
Return the number of kinect devices currently connected to the system
- Parameters
-
ctx Context to access device count through
- Returns
- Number of devices connected, < 0 on error
Definition at line 308 of file fakenect.c.
| int freenect_open_device | ( | freenect_context * | ctx, |
| freenect_device ** | dev, | ||
| int | index | ||
| ) |
Opens a kinect device via a context. Index specifies the index of the device on the current state of the bus. Bus resets may cause indexes to shift.
- Parameters
-
ctx Context to open device through dev Device structure to assign opened device to index Index of the device on the bus
- Returns
- 0 on success, < 0 on error
Definition at line 314 of file fakenect.c.
| int freenect_open_device_by_camera_serial | ( | freenect_context * | ctx, |
| freenect_device ** | dev, | ||
| const char * | camera_serial | ||
| ) |
Opens a kinect device (via a context) associated with a particular camera subdevice serial number. This function will fail if no device with a matching serial number is found.
- Parameters
-
ctx Context to open device through dev Device structure to assign opened device to camera_serial Null-terminated ASCII string containing the serial number of the camera subdevice in the device to open
- Returns
- 0 on success, < 0 on error
Definition at line 321 of file fakenect.c.
| int freenect_process_events | ( | freenect_context * | ctx | ) |
Calls the platform specific usb event processor
- Parameters
-
ctx context to process events for
- Returns
- 0 on success, other values on error, platform/library dependant
Definition at line 140 of file fakenect.c.
| int freenect_process_events_timeout | ( | freenect_context * | ctx, |
| struct timeval * | timeout | ||
| ) |
Calls the platform specific usb event processor until either an event occurs or the timeout parameter time has passed. If a zero timeval is passed, this function will handle any already-pending events, then return immediately.
- Parameters
-
ctx Context to process events for timeout Pointer to a timeval containing the maximum amount of time to block waiting for events, or zero for nonblocking mode
- Returns
- 0 on success, other values on error, platform/library dependant
Definition at line 206 of file fakenect.c.
| void freenect_select_subdevices | ( | freenect_context * | ctx, |
| freenect_device_flags | subdevs | ||
| ) |
Set which subdevices any subsequent calls to freenect_open_device() should open. This will not affect devices which have already been opened. The default behavior, should you choose not to call this function at all, is to open all supported subdevices - motor, cameras, and audio, if supported on the platform.
- Parameters
-
ctx Context to set future subdevice selection for subdevs Flags representing the subdevices to select
Definition at line 338 of file fakenect.c.
| int freenect_set_depth_buffer | ( | freenect_device * | dev, |
| void * | buf | ||
| ) |
Set the buffer to store depth information to. Size of buffer is dependant on depth format. See FREENECT_DEPTH_*_SIZE defines for more information.
- Parameters
-
dev Device to set depth buffer for. buf Buffer to store depth information to.
- Returns
- 0 on success, < 0 on error
Definition at line 343 of file fakenect.c.
| void freenect_set_depth_callback | ( | freenect_device * | dev, |
| freenect_depth_cb | cb | ||
| ) |
Set callback for depth information received event
- Parameters
-
dev Device to set callback for cb Function pointer for processing depth information
Definition at line 236 of file fakenect.c.
| int freenect_set_depth_format | ( | freenect_device * | dev, |
| freenect_depth_format | fmt | ||
| ) |
Definition at line 394 of file fakenect.c.
| int freenect_set_depth_mode | ( | freenect_device * | dev, |
| const freenect_frame_mode | mode | ||
| ) |
Sets the current depth mode for the specified device. The mode cannot be changed while streaming is active.
- Parameters
-
dev Device for which to set the depth mode mode Frame mode to set
- Returns
- 0 on success, < 0 if error
Definition at line 253 of file fakenect.c.
| int freenect_set_led | ( | freenect_device * | dev, |
| freenect_led_options | option | ||
| ) |
Set the state of the LED. Uses blocking control message call to update device.
- Parameters
-
dev Device to set the LED state option LED state to set on device. See freenect_led_options enum.
- Returns
- 0 on success, < 0 on error
Definition at line 414 of file fakenect.c.
| void freenect_set_log_callback | ( | freenect_context * | ctx, |
| freenect_log_cb | cb | ||
| ) |
Callback for log messages (i.e. for rerouting to a file instead of stdout)
- Parameters
-
ctx context to set log callback for cb callback function pointer
Definition at line 400 of file fakenect.c.
| void freenect_set_log_level | ( | freenect_context * | ctx, |
| freenect_loglevel | level | ||
| ) |
Set the log level for the specified freenect context
- Parameters
-
ctx context to set log level for level log level to use (see freenect_loglevel enum)
Definition at line 401 of file fakenect.c.
| int freenect_set_tilt_degs | ( | freenect_device * | dev, |
| double | angle | ||
| ) |
Set the tilt state of the device, in degrees with respect to the horizon. Uses blocking control message call to update device. Function return does not reflect state of device, device may still be moving to new position after the function returns. Use freenect_get_tilt_status() to find current movement state.
- Parameters
-
dev Device to set tilt state angle Angle the device should tilt to
- Returns
- 0 on success, < 0 on error.
Definition at line 410 of file fakenect.c.
| void freenect_set_user | ( | freenect_device * | dev, |
| void * | user | ||
| ) |
Set the device user data, for passing generic information into callbacks
- Parameters
-
dev Device to attach user data to user User data to attach
Definition at line 355 of file fakenect.c.
| int freenect_set_video_buffer | ( | freenect_device * | dev, |
| void * | buf | ||
| ) |
Set the buffer to store depth information to. Size of buffer is dependant on video format. See FREENECT_VIDEO_*_SIZE defines for more information.
- Parameters
-
dev Device to set video buffer for. buf Buffer to store video information to.
- Returns
- 0 on success, < 0 on error
Definition at line 349 of file fakenect.c.
| void freenect_set_video_callback | ( | freenect_device * | dev, |
| freenect_video_cb | cb | ||
| ) |
Set callback for video information received event
- Parameters
-
dev Device to set callback for cb Function pointer for processing video information
Definition at line 241 of file fakenect.c.
| int freenect_set_video_format | ( | freenect_device * | dev, |
| freenect_video_format | fmt | ||
| ) |
Definition at line 389 of file fakenect.c.
| int freenect_set_video_mode | ( | freenect_device * | dev, |
| freenect_frame_mode | mode | ||
| ) |
Sets the current video mode for the specified device. If the freenect_frame_mode specified is not one provided by the driver e.g. from freenect_get_video_mode() or freenect_find_video_mode() then behavior is undefined. The current video mode cannot be changed while streaming is active.
- Parameters
-
dev Device for which to set the video mode mode Frame mode to set
- Returns
- 0 on success, < 0 if error
Definition at line 246 of file fakenect.c.
| int freenect_shutdown | ( | freenect_context * | ctx | ) |
Closes the device if it is open, and frees the context
- Parameters
-
ctx freenect context to close/free
- Returns
- 0 on success
Definition at line 402 of file fakenect.c.
| int freenect_start_depth | ( | freenect_device * | dev | ) |
Start the depth information stream for a device.
- Parameters
-
dev Device to start depth information stream for.
- Returns
- 0 on success, < 0 on error
Definition at line 365 of file fakenect.c.
| int freenect_start_video | ( | freenect_device * | dev | ) |
Start the video information stream for a device.
- Parameters
-
dev Device to start video information stream for.
- Returns
- 0 on success, < 0 on error
Definition at line 371 of file fakenect.c.
| int freenect_stop_depth | ( | freenect_device * | dev | ) |
Stop the depth information stream for a device
- Parameters
-
dev Device to stop depth information stream on.
- Returns
- 0 on success, < 0 on error
Definition at line 377 of file fakenect.c.
| int freenect_stop_video | ( | freenect_device * | dev | ) |
Stop the video information stream for a device
- Parameters
-
dev Device to stop video information stream on.
- Returns
- 0 on success, < 0 on error
Definition at line 383 of file fakenect.c.
| int freenect_supported_subdevices | ( | void | ) |
Answer which subdevices this library supports. This is most useful for wrappers trying to determine whether the underlying library was built with audio support or not, so the wrapper can avoid calling functions that do not exist.
- Returns
- Flags representing the subdevices that the library supports opening (see freenect_device_flags)
Definition at line 333 of file fakenect.c.
| int freenect_update_tilt_state | ( | freenect_device * | dev | ) |
Updates the accelerometer state using a blocking control message call.
- Parameters
-
dev Device to get accelerometer data from
- Returns
- 0 on success, < 0 on error. Accelerometer data stored to device struct.
Definition at line 418 of file fakenect.c.
|
static |
Definition at line 72 of file fakenect.c.
|
static |
Definition at line 55 of file fakenect.c.
|
static |
Definition at line 112 of file fakenect.c.
|
static |
Definition at line 81 of file fakenect.c.
|
static |
Definition at line 130 of file fakenect.c.
Variable Documentation
|
static |
Definition at line 46 of file fakenect.c.
|
static |
Definition at line 41 of file fakenect.c.
|
static |
Definition at line 42 of file fakenect.c.
|
static |
Definition at line 49 of file fakenect.c.
|
static |
Definition at line 51 of file fakenect.c.
|
static |
Definition at line 40 of file fakenect.c.
|
static |
Definition at line 39 of file fakenect.c.
|
static |
Definition at line 44 of file fakenect.c.
|
static |
Definition at line 43 of file fakenect.c.
|
static |
Definition at line 47 of file fakenect.c.
|
static |
Definition at line 48 of file fakenect.c.
|
static |
Definition at line 50 of file fakenect.c.
|
static |
Definition at line 52 of file fakenect.c.
|
static |
Definition at line 45 of file fakenect.c.
|
static |
Definition at line 53 of file fakenect.c.