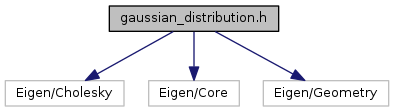
#include "Eigen/Cholesky"#include "Eigen/Core"#include "Eigen/Geometry"
Include dependency graph for gaussian_distribution.h:
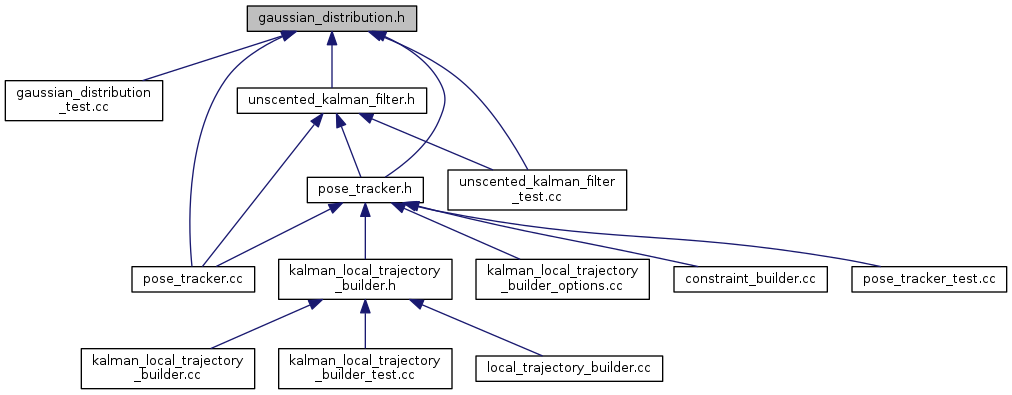
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | cartographer::kalman_filter::GaussianDistribution< T, N > |
Namespaces | |
| cartographer | |
| cartographer::kalman_filter | |
Functions | |
| template<typename T , int N, int M> | |
| GaussianDistribution< T, N > | cartographer::kalman_filter::operator* (const Eigen::Matrix< T, N, M > &lhs, const GaussianDistribution< T, M > &rhs) |
| template<typename T , int N> | |
| GaussianDistribution< T, N > | cartographer::kalman_filter::operator+ (const GaussianDistribution< T, N > &lhs, const GaussianDistribution< T, N > &rhs) |