#include <Matcher_Points_InlierRatio.h>
Public Member Functions | |
| void | initialize (const mrpt::containers::yaml ¶ms) override |
| Matcher_Points_InlierRatio () | |
| Matcher_Points_InlierRatio (const double ratio) | |
 Public Member Functions inherited from mp2p_icp::Matcher_Points_Base Public Member Functions inherited from mp2p_icp::Matcher_Points_Base | |
| Matcher_Points_Base ()=default | |
| Public Member Functions inherited from mp2p_icp::Matcher | |
| virtual bool | match (const metric_map_t &pcGlobal, const metric_map_t &pcLocal, const mrpt::poses::CPose3D &localPose, const MatchContext &mc, MatchState &ms, Pairings &out) const |
| Public Member Functions inherited from mp2p_icp::Parameterizable | |
| ParameterSource * | attachedSource () |
| const ParameterSource * | attachedSource () const |
| virtual void | attachToParameterSource (ParameterSource &source) |
| void | checkAllParametersAreRealized () const |
| auto & | declaredParameters () |
| const auto & | declaredParameters () const |
| void | unrealizeParameters () |
| Mark all non-constant parameters as non-evaluated again. More... | |
Private Member Functions | |
| void | implMatchOneLayer (const mrpt::maps::CMetricMap &pcGlobal, const mrpt::maps::CPointsMap &pcLocal, const mrpt::poses::CPose3D &localPose, MatchState &ms, const layer_name_t &globalName, const layer_name_t &localName, Pairings &out) const override |
Private Attributes | |
| double | inliersRatio = 0.80 |
Additional Inherited Members | |
| Static Public Member Functions inherited from mp2p_icp::Matcher_Points_Base | |
| static TransformedLocalPointCloud | transform_local_to_global (const mrpt::maps::CPointsMap &pcLocal, const mrpt::poses::CPose3D &localPose, const std::size_t maxLocalPoints=0, const uint64_t localPointsSampleSeed=0) |
| Public Attributes inherited from mp2p_icp::Matcher_Points_Base | |
| bool | allowMatchAlreadyMatchedGlobalPoints_ = false |
| bool | allowMatchAlreadyMatchedPoints_ = false |
| double | bounding_box_intersection_check_epsilon_ = 0.20 |
| std::optional< std::size_t > | kdtree_leaf_max_points_ |
| uint64_t | localPointsSampleSeed_ = 0 |
| uint64_t | maxLocalPointsPerLayer_ = 0 |
| std::map< std::string, std::map< std::string, double > > | weight_pt2pt_layers |
| Public Attributes inherited from mp2p_icp::Matcher | |
| bool | enabled = true |
| uint32_t | runFromIteration = 0 |
| uint32_t | runUpToIteration = 0 |
| 0: no limit More... | |
| Protected Member Functions inherited from mp2p_icp::Matcher_Points_Base | |
| bool | impl_match (const metric_map_t &pcGlobal, const metric_map_t &pcLocal, const mrpt::poses::CPose3D &localPose, const MatchContext &mc, MatchState &ms, Pairings &out) const override final |
| Protected Member Functions inherited from mp2p_icp::Parameterizable | |
| void | parseAndDeclareParameter (const std::string &value, double &target) |
| void | parseAndDeclareParameter (const std::string &value, float &target) |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| void | parseAndDeclareParameter (const std::string &value, uint32_t &target) |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
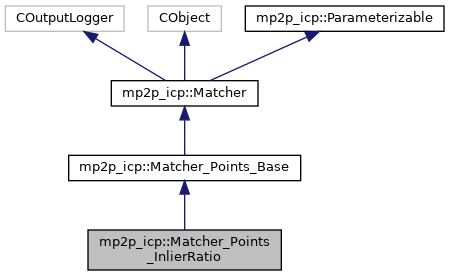
Detailed Description
Pointcloud matcher: fixed ratio of inliers/outliers by distance
Finds point-to-point pairings between the local and global input metric maps.
By default, each local point layer is matched against the layer with the same name in the global map, unless specified otherwise in the base class member weight_pt2pt_layers. Refer to example configuration YAML files for example configurations.
Definition at line 30 of file Matcher_Points_InlierRatio.h.
Constructor & Destructor Documentation
◆ Matcher_Points_InlierRatio() [1/2]
| Matcher_Points_InlierRatio::Matcher_Points_InlierRatio | ( | ) |
Definition at line 22 of file Matcher_Points_InlierRatio.cpp.
◆ Matcher_Points_InlierRatio() [2/2]
|
inline |
Definition at line 36 of file Matcher_Points_InlierRatio.h.
Member Function Documentation
◆ implMatchOneLayer()
|
overrideprivatevirtual |
Implements mp2p_icp::Matcher_Points_Base.
Definition at line 34 of file Matcher_Points_InlierRatio.cpp.
◆ initialize()
|
overridevirtual |
Parameters: inliersRatio: Inliers distance ratio threshold [0-1]
Reimplemented from mp2p_icp::Matcher_Points_Base.
Definition at line 27 of file Matcher_Points_InlierRatio.cpp.
Member Data Documentation
◆ inliersRatio
|
private |
Inliers distance ratio threshold [0-1]
Definition at line 48 of file Matcher_Points_InlierRatio.h.
The documentation for this class was generated from the following files: