#include <FilterBase.h>
Public Member Functions | |
| FilterBase () | |
| virtual | ~FilterBase () |
API for all filtering/segmentation algorithms | |
| virtual void | initialize (const mrpt::containers::yaml &cfg_block)=0 |
| virtual void | filter (mp2p_icp::metric_map_t &inOut) const =0 |
Detailed Description
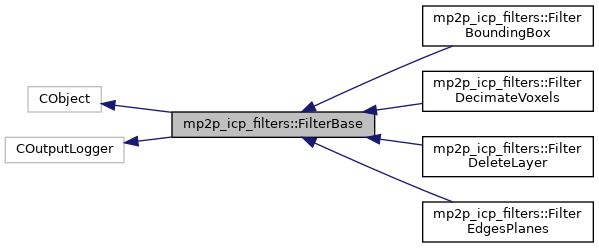
Pure virtual base class of filters, modifying an input/output metric_map_t.
Filters can be used to remove noisy points from a point cloud, decimate it, or to detect planes, lines, or split points into different layers.
- See also
- Generator
Definition at line 37 of file FilterBase.h.
Constructor & Destructor Documentation
◆ FilterBase()
| FilterBase::FilterBase | ( | ) |
Definition at line 20 of file FilterBase.cpp.
◆ ~FilterBase()
|
virtualdefault |
Member Function Documentation
◆ filter()
|
pure virtual |
See docs above for FilterBase.
Implemented in mp2p_icp_filters::FilterDecimateVoxels, mp2p_icp_filters::FilterEdgesPlanes, mp2p_icp_filters::FilterBoundingBox, and mp2p_icp_filters::FilterDeleteLayer.
◆ initialize()
|
pure virtual |
Loads, from a YAML configuration block, all the common, and implementation-specific parameters.
Implemented in mp2p_icp_filters::FilterDecimateVoxels, mp2p_icp_filters::FilterEdgesPlanes, mp2p_icp_filters::FilterBoundingBox, and mp2p_icp_filters::FilterDeleteLayer.
The documentation for this class was generated from the following files: