Unit tests for incremental inference. More...
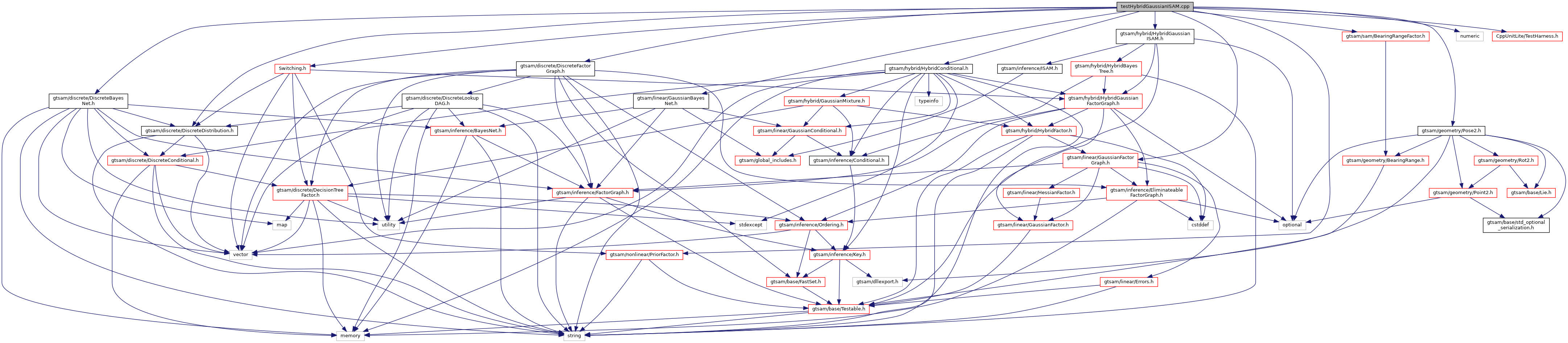
#include <gtsam/discrete/DiscreteBayesNet.h>#include <gtsam/discrete/DiscreteDistribution.h>#include <gtsam/discrete/DiscreteFactorGraph.h>#include <gtsam/discrete/TableDistribution.h>#include <gtsam/geometry/Pose2.h>#include <gtsam/hybrid/HybridConditional.h>#include <gtsam/hybrid/HybridGaussianISAM.h>#include <gtsam/linear/GaussianBayesNet.h>#include <gtsam/linear/GaussianFactorGraph.h>#include <gtsam/nonlinear/PriorFactor.h>#include <gtsam/sam/BearingRangeFactor.h>#include "Switching.h"#include <CppUnitLite/TestHarness.h>
Include dependency graph for testHybridGaussianISAM.cpp:
Go to the source code of this file.
Namespaces | |
| switching3 | |
Functions | |
| int | main () |
| TEST (HybridGaussianISAM, ApproxInference) | |
| TEST (HybridGaussianISAM, IncrementalApproximate) | |
| TEST (HybridGaussianISAM, IncrementalElimination) | |
| TEST (HybridGaussianISAM, IncrementalInference) | |
| TEST (HybridGaussianISAM, NonTrivial) | |
Variables | |
| const HybridGaussianFactorGraph | switching3::graph1 {lfg.at(0), lfg.at(3), lfg.at(5)} |
| const HybridGaussianFactorGraph | switching3::graph2 |
| const HybridGaussianFactorGraph & | switching3::lfg = switching.linearizedFactorGraph() |
| const Switching | switching3::switching (3) |
Detailed Description
Function Documentation
◆ main()
| int main | ( | ) |
Definition at line 496 of file testHybridGaussianISAM.cpp.
◆ TEST() [1/5]
| TEST | ( | HybridGaussianISAM | , |
| ApproxInference | |||
| ) |
Definition at line 160 of file testHybridGaussianISAM.cpp.
◆ TEST() [2/5]
| TEST | ( | HybridGaussianISAM | , |
| IncrementalApproximate | |||
| ) |
Definition at line 258 of file testHybridGaussianISAM.cpp.
◆ TEST() [3/5]
| TEST | ( | HybridGaussianISAM | , |
| IncrementalElimination | |||
| ) |
Definition at line 60 of file testHybridGaussianISAM.cpp.
◆ TEST() [4/5]
| TEST | ( | HybridGaussianISAM | , |
| IncrementalInference | |||
| ) |
Definition at line 92 of file testHybridGaussianISAM.cpp.
◆ TEST() [5/5]
| TEST | ( | HybridGaussianISAM | , |
| NonTrivial | |||
| ) |
Definition at line 313 of file testHybridGaussianISAM.cpp.