Unit tests for GaussianISAM2. More...
#include <gtsam/nonlinear/ISAM2.h>#include <tests/smallExample.h>#include <gtsam/slam/BetweenFactor.h>#include <gtsam/sam/BearingRangeFactor.h>#include <gtsam/geometry/Point2.h>#include <gtsam/geometry/Pose2.h>#include <gtsam/geometry/Pose3.h>#include <gtsam/nonlinear/Values.h>#include <gtsam/nonlinear/NonlinearFactorGraph.h>#include <gtsam/nonlinear/Marginals.h>#include <gtsam/linear/GaussianBayesNet.h>#include <gtsam/linear/GaussianBayesTree.h>#include <gtsam/linear/GaussianFactorGraph.h>#include <gtsam/inference/Ordering.h>#include <gtsam/base/debug.h>#include <gtsam/base/TestableAssertions.h>#include <gtsam/base/treeTraversal-inst.h>#include <CppUnitLite/TestHarness.h>#include <cassert>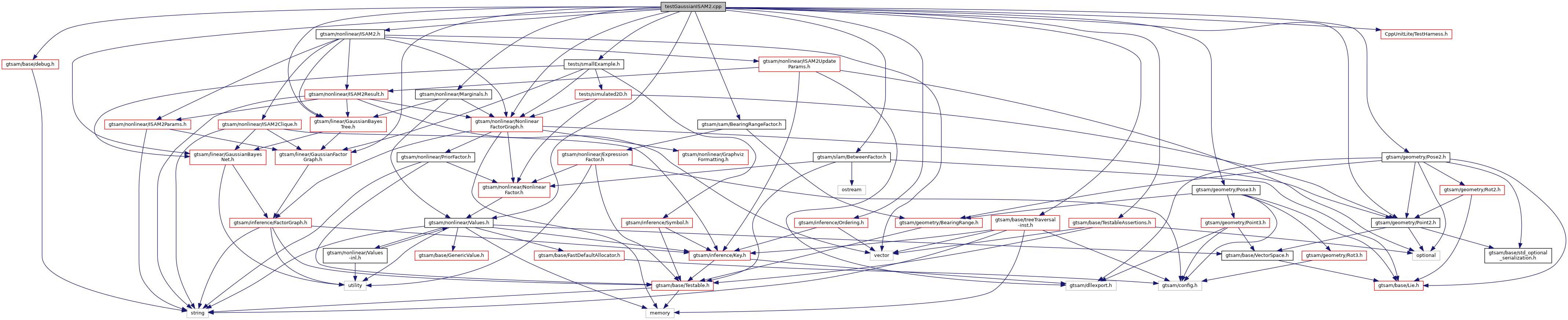
Go to the source code of this file.
Classes | |
| struct | ConsistencyVisitor |
| class | FixActiveFactor |
Functions | |
| ISAM2 | createSlamlikeISAM2 (Values *init_values=nullptr, NonlinearFactorGraph *full_graph=nullptr, const ISAM2Params ¶ms=ISAM2Params(ISAM2GaussNewtonParams(0.001), 0.0, 0, false, true, ISAM2Params::CHOLESKY, true, DefaultKeyFormatter, true), size_t maxPoses=10) |
| bool | isam_check (const NonlinearFactorGraph &fullgraph, const Values &fullinit, const ISAM2 &isam, Test &test, TestResult &result) |
| int | main () |
| TEST (ActiveFactorTesting, Issue1596) | |
| TEST (ISAM2, calculate_nnz) | |
| TEST (ISAM2, clone) | |
| TEST (ISAM2, constrained_ordering) | |
| TEST (ISAM2, marginalCovariance) | |
| TEST (ISAM2, marginalizationSize) | |
| TEST (ISAM2, marginalizeLeaves1) | |
| TEST (ISAM2, marginalizeLeaves2) | |
| TEST (ISAM2, marginalizeLeaves3) | |
| TEST (ISAM2, marginalizeLeaves4) | |
| TEST (ISAM2, marginalizeLeaves5) | |
| TEST (ISAM2, marginalizeLeaves6) | |
| TEST (ISAM2, MarginalizeRoot) | |
| TEST (ISAM2, removeFactors) | |
| TEST (ISAM2, removeVariables) | |
| TEST (ISAM2, simple) | |
| TEST (ISAM2, slamlike_solution_dogleg) | |
| TEST (ISAM2, slamlike_solution_dogleg_qr) | |
| TEST (ISAM2, slamlike_solution_gaussnewton) | |
| TEST (ISAM2, slamlike_solution_gaussnewton_qr) | |
| TEST (ISAM2, slamlike_solution_partial_relinearization_check) | |
| TEST (ISAM2, swapFactors) | |
Variables | |
| SharedDiagonal | brNoise = noiseModel::Diagonal::Sigmas((Vector(2) << M_PI/100.0, 0.1).finished()) |
| static const SharedNoiseModel | model |
| SharedDiagonal | odoNoise = noiseModel::Diagonal::Sigmas((Vector(3) << 0.1, 0.1, M_PI/100.0).finished()) |
Detailed Description
Unit tests for GaussianISAM2.
Definition in file testGaussianISAM2.cpp.
Function Documentation
◆ createSlamlikeISAM2()
| ISAM2 createSlamlikeISAM2 | ( | Values * | init_values = nullptr, |
| NonlinearFactorGraph * | full_graph = nullptr, |
||
| const ISAM2Params & | params = ISAM2Params(ISAM2GaussNewtonParams(0.001), 0.0, 0, false, true, ISAM2Params::CHOLESKY, true, DefaultKeyFormatter, true), |
||
| size_t | maxPoses = 10 |
||
| ) |
Definition at line 44 of file testGaussianISAM2.cpp.
◆ isam_check()
| bool isam_check | ( | const NonlinearFactorGraph & | fullgraph, |
| const Values & | fullinit, | ||
| const ISAM2 & | isam, | ||
| Test & | test, | ||
| TestResult & | result | ||
| ) |
Definition at line 223 of file testGaussianISAM2.cpp.
◆ main()
| int main | ( | ) |
Definition at line 1049 of file testGaussianISAM2.cpp.
◆ TEST() [1/22]
| TEST | ( | ActiveFactorTesting | , |
| Issue1596 | |||
| ) |
Definition at line 1020 of file testGaussianISAM2.cpp.
◆ TEST() [2/22]
| TEST | ( | ISAM2 | , |
| calculate_nnz | |||
| ) |
Definition at line 989 of file testGaussianISAM2.cpp.
◆ TEST() [3/22]
| TEST | ( | ISAM2 | , |
| clone | |||
| ) |
Definition at line 346 of file testGaussianISAM2.cpp.
◆ TEST() [4/22]
| TEST | ( | ISAM2 | , |
| constrained_ordering | |||
| ) |
Definition at line 479 of file testGaussianISAM2.cpp.
◆ TEST() [5/22]
| TEST | ( | ISAM2 | , |
| marginalCovariance | |||
| ) |
Definition at line 977 of file testGaussianISAM2.cpp.
◆ TEST() [6/22]
| TEST | ( | ISAM2 | , |
| marginalizationSize | |||
| ) |
Definition at line 946 of file testGaussianISAM2.cpp.
◆ TEST() [7/22]
| TEST | ( | ISAM2 | , |
| marginalizeLeaves1 | |||
| ) |
Definition at line 736 of file testGaussianISAM2.cpp.
◆ TEST() [8/22]
| TEST | ( | ISAM2 | , |
| marginalizeLeaves2 | |||
| ) |
Definition at line 762 of file testGaussianISAM2.cpp.
◆ TEST() [9/22]
| TEST | ( | ISAM2 | , |
| marginalizeLeaves3 | |||
| ) |
Definition at line 792 of file testGaussianISAM2.cpp.
◆ TEST() [10/22]
| TEST | ( | ISAM2 | , |
| marginalizeLeaves4 | |||
| ) |
Definition at line 831 of file testGaussianISAM2.cpp.
◆ TEST() [11/22]
| TEST | ( | ISAM2 | , |
| marginalizeLeaves5 | |||
| ) |
Definition at line 856 of file testGaussianISAM2.cpp.
◆ TEST() [12/22]
| TEST | ( | ISAM2 | , |
| marginalizeLeaves6 | |||
| ) |
Definition at line 867 of file testGaussianISAM2.cpp.
◆ TEST() [13/22]
| TEST | ( | ISAM2 | , |
| MarginalizeRoot | |||
| ) |
Definition at line 916 of file testGaussianISAM2.cpp.
◆ TEST() [14/22]
| TEST | ( | ISAM2 | , |
| removeFactors | |||
| ) |
Definition at line 380 of file testGaussianISAM2.cpp.
◆ TEST() [15/22]
| TEST | ( | ISAM2 | , |
| removeVariables | |||
| ) |
Definition at line 403 of file testGaussianISAM2.cpp.
◆ TEST() [16/22]
| TEST | ( | ISAM2 | , |
| simple | |||
| ) |
Definition at line 284 of file testGaussianISAM2.cpp.
◆ TEST() [17/22]
| TEST | ( | ISAM2 | , |
| slamlike_solution_dogleg | |||
| ) |
Definition at line 310 of file testGaussianISAM2.cpp.
◆ TEST() [18/22]
| TEST | ( | ISAM2 | , |
| slamlike_solution_dogleg_qr | |||
| ) |
Definition at line 334 of file testGaussianISAM2.cpp.
◆ TEST() [19/22]
| TEST | ( | ISAM2 | , |
| slamlike_solution_gaussnewton | |||
| ) |
Definition at line 298 of file testGaussianISAM2.cpp.
◆ TEST() [20/22]
| TEST | ( | ISAM2 | , |
| slamlike_solution_gaussnewton_qr | |||
| ) |
Definition at line 322 of file testGaussianISAM2.cpp.
◆ TEST() [21/22]
| TEST | ( | ISAM2 | , |
| slamlike_solution_partial_relinearization_check | |||
| ) |
Definition at line 603 of file testGaussianISAM2.cpp.
◆ TEST() [22/22]
| TEST | ( | ISAM2 | , |
| swapFactors | |||
| ) |
Definition at line 426 of file testGaussianISAM2.cpp.
Variable Documentation
◆ brNoise
| SharedDiagonal brNoise = noiseModel::Diagonal::Sigmas((Vector(2) << M_PI/100.0, 0.1).finished()) |
Definition at line 42 of file testGaussianISAM2.cpp.
◆ model
|
static |
Definition at line 34 of file testGaussianISAM2.cpp.
◆ odoNoise
| SharedDiagonal odoNoise = noiseModel::Diagonal::Sigmas((Vector(3) << 0.1, 0.1, M_PI/100.0).finished()) |
Definition at line 41 of file testGaussianISAM2.cpp.