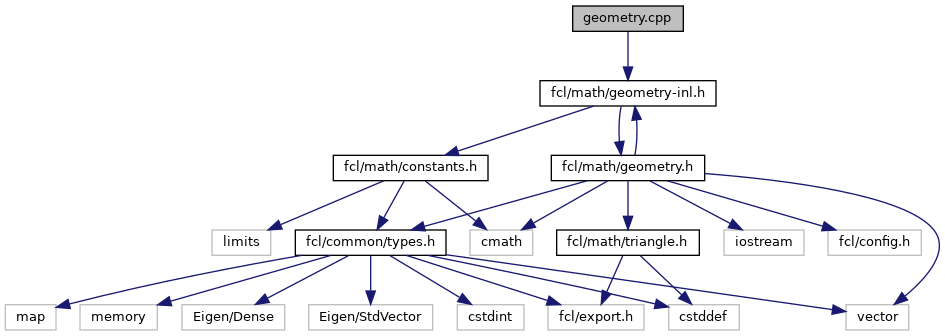
#include "fcl/math/geometry-inl.h"
Include dependency graph for geometry.cpp:
Go to the source code of this file.
Namespaces | |
| fcl | |
| Main namespace. | |
| fcl::detail | |
Functions | |
| template void | fcl::axisFromEigen (const Matrix3d &eigenV, const Vector3d &eigenS, Matrix3d &axis) |
| template void | fcl::axisFromEigen (const Matrix3d &eigenV, const Vector3d &eigenS, Transform3d &tf) |
| template void | fcl::circumCircleComputation (const Vector3d &a, const Vector3d &b, const Vector3d &c, Vector3d ¢er, double &radius) |
| template void | fcl::eigen (const Matrix3d &m, Vector3d &dout, Matrix3d &vout) |
| template void | fcl::eigen_old (const Matrix3d &m, Vector3d &dout, Matrix3d &vout) |
| template Matrix3d | fcl::generateCoordinateSystem (const Vector3d &x_axis) |
| template void | fcl::getCovariance (const Vector3d *const ps, const Vector3d *const ps2, Triangle *ts, unsigned int *indices, int n, Matrix3d &M) |
| template void | fcl::getExtentAndCenter (const Vector3d *const ps, const Vector3d *const ps2, Triangle *ts, unsigned int *indices, int n, const Matrix3d &axis, Vector3d ¢er, Vector3d &extent) |
| template void | fcl::detail::getExtentAndCenter_mesh (const Vector3d *const ps, const Vector3d *const ps2, Triangle *ts, unsigned int *indices, int n, const Matrix3d &axis, Vector3d ¢er, Vector3d &extent) |
| template void | fcl::detail::getExtentAndCenter_pointcloud (const Vector3d *const ps, const Vector3d *const ps2, unsigned int *indices, int n, const Matrix3d &axis, Vector3d ¢er, Vector3d &extent) |
| template void | fcl::getRadiusAndOriginAndRectangleSize (const Vector3d *const ps, const Vector3d *const ps2, Triangle *ts, unsigned int *indices, int n, const Matrix3d &axis, Vector3d &origin, double l[2], double &r) |
| template void | fcl::getRadiusAndOriginAndRectangleSize (const Vector3d *const ps, const Vector3d *const ps2, Triangle *ts, unsigned int *indices, int n, Transform3d &tf, double l[2], double &r) |
| template void | fcl::hat (Matrix3d &mat, const Vector3d &vec) |
| template double | fcl::maximumDistance (const Vector3d *const ps, const Vector3d *const ps2, Triangle *ts, unsigned int *indices, int n, const Vector3d &query) |
| template double | fcl::detail::maximumDistance_mesh (const Vector3d *const ps, const Vector3d *const ps2, Triangle *ts, unsigned int *indices, int n, const Vector3d &query) |
| template double | fcl::detail::maximumDistance_pointcloud (const Vector3d *const ps, const Vector3d *const ps2, unsigned int *indices, int n, const Vector3d &query) |
| template void | fcl::normalize (Vector3d &v, bool *signal) |