The maximum velocity used for move to position command when executing a ramp to a position. In sensorless commutation mode the velocity threshold for hallFX. In sensorless commutation mode used as velocity threshold for hallFXTM. Set this value to a realistic velocity which the motor can reach! More...
#include <YouBotJointParameter.hpp>
Public Member Functions | |
| void | getParameter (quantity< angular_velocity > ¶meter) const |
| MaximumPositioningVelocity () | |
| void | setParameter (const quantity< angular_velocity > ¶meter) |
| void | toString (std::string &value) |
| virtual | ~MaximumPositioningVelocity () |
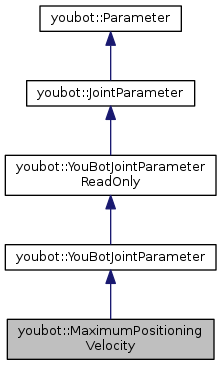
 Public Member Functions inherited from youbot::YouBotJointParameter Public Member Functions inherited from youbot::YouBotJointParameter | |
| virtual | ~YouBotJointParameter () |
| Public Member Functions inherited from youbot::YouBotJointParameterReadOnly | |
| virtual | ~YouBotJointParameterReadOnly () |
Private Member Functions | |
| std::string | getName () const |
| ParameterType | getType () const |
| void | getYouBotMailboxMsg (YouBotSlaveMailboxMsg &message, TMCLCommandNumber msgType, const YouBotJointStorage &storage) const |
| void | setYouBotMailboxMsg (const YouBotSlaveMailboxMsg &message, const YouBotJointStorage &storage) |
Private Attributes | |
| quantity< angular_velocity > | lowerLimit |
| std::string | name |
| ParameterType | parameterType |
| quantity< angular_velocity > | upperLimit |
| quantity< angular_velocity > | value |
Friends | |
| class | YouBotJoint |
Additional Inherited Members | |
| Protected Member Functions inherited from youbot::YouBotJointParameter | |
| YouBotJointParameter () | |
| Protected Member Functions inherited from youbot::YouBotJointParameterReadOnly | |
| YouBotJointParameterReadOnly () | |
| Protected Attributes inherited from youbot::YouBotJointParameter | |
| std::string | name |
| ParameterType | parameterType |
| Protected Attributes inherited from youbot::YouBotJointParameterReadOnly | |
| std::string | name |
| ParameterType | parameterType |
Detailed Description
The maximum velocity used for move to position command when executing a ramp to a position. In sensorless commutation mode the velocity threshold for hallFX. In sensorless commutation mode used as velocity threshold for hallFXTM. Set this value to a realistic velocity which the motor can reach!
Definition at line 468 of file YouBotJointParameter.hpp.
Constructor & Destructor Documentation
| youbot::MaximumPositioningVelocity::MaximumPositioningVelocity | ( | ) |
Definition at line 458 of file YouBotJointParameter.cpp.
|
virtual |
Definition at line 467 of file YouBotJointParameter.cpp.
Member Function Documentation
|
inlineprivatevirtual |
Implements youbot::YouBotJointParameter.
Definition at line 487 of file YouBotJointParameter.hpp.
| void youbot::MaximumPositioningVelocity::getParameter | ( | quantity< angular_velocity > & | parameter | ) | const |
Definition at line 472 of file YouBotJointParameter.cpp.
|
inlineprivatevirtual |
Implements youbot::YouBotJointParameter.
Definition at line 489 of file YouBotJointParameter.hpp.
|
privatevirtual |
Implements youbot::YouBotJointParameter.
Definition at line 499 of file YouBotJointParameter.cpp.
| void youbot::MaximumPositioningVelocity::setParameter | ( | const quantity< angular_velocity > & | parameter | ) |
Definition at line 478 of file YouBotJointParameter.cpp.
|
privatevirtual |
Implements youbot::YouBotJointParameter.
Definition at line 510 of file YouBotJointParameter.cpp.
|
virtual |
Implements youbot::YouBotJointParameter.
Definition at line 491 of file YouBotJointParameter.cpp.
Friends And Related Function Documentation
|
friend |
Definition at line 469 of file YouBotJointParameter.hpp.
Member Data Documentation
|
private |
Definition at line 493 of file YouBotJointParameter.hpp.
|
private |
Definition at line 497 of file YouBotJointParameter.hpp.
|
private |
Definition at line 499 of file YouBotJointParameter.hpp.
|
private |
Definition at line 489 of file YouBotJointParameter.hpp.
|
private |
Definition at line 495 of file YouBotJointParameter.hpp.
The documentation for this class was generated from the following files: