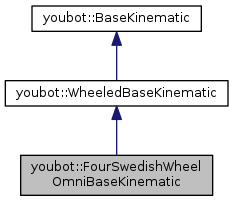
Implementation of a base kinematic with four swedish wheels. The youBot base kinematic.
More...
#include <FourSwedishWheelOmniBaseKinematic.hpp>
|
| virtual void | cartesianPositionToWheelPositions (const quantity< si::length > &longitudinalPosition, const quantity< si::length > &transversalPosition, const quantity< plane_angle > &orientation, std::vector< quantity< plane_angle > > &wheelPositions) |
| |
| virtual void | cartesianVelocityToWheelVelocities (const quantity< si::velocity > &longitudinalVelocity, const quantity< si::velocity > &transversalVelocity, const quantity< si::angular_velocity > &angularVelocity, std::vector< quantity< angular_velocity > > &wheelVelocities) |
| |
| | FourSwedishWheelOmniBaseKinematic () |
| |
| void | getConfiguration (FourSwedishWheelOmniBaseKinematicConfiguration &configuration) const |
| |
| void | setConfiguration (const FourSwedishWheelOmniBaseKinematicConfiguration &configuration) |
| |
| virtual void | wheelPositionsToCartesianPosition (const std::vector< quantity< plane_angle > > &wheelPositions, quantity< si::length > &longitudinalPosition, quantity< si::length > &transversalPosition, quantity< plane_angle > &orientation) |
| |
| virtual void | wheelVelocitiesToCartesianVelocity (const std::vector< quantity< angular_velocity > > &wheelVelocities, quantity< si::velocity > &longitudinalVelocity, quantity< si::velocity > &transversalVelocity, quantity< angular_velocity > &angularVelocity) |
| |
| virtual | ~FourSwedishWheelOmniBaseKinematic () |
| |
| virtual void | cartesianVelocityToWheelVelocities (const quantity< si::velocity > &longitudinalVelocity, const quantity< si::velocity > &transversalVelocity, const quantity< angular_velocity > &angularVelocity, std::vector< quantity< angular_velocity > > &wheelVelocities)=0 |
| |
Implementation of a base kinematic with four swedish wheels. The youBot base kinematic.
Definition at line 65 of file FourSwedishWheelOmniBaseKinematic.hpp.
| youbot::FourSwedishWheelOmniBaseKinematic::FourSwedishWheelOmniBaseKinematic |
( |
| ) |
|
| youbot::FourSwedishWheelOmniBaseKinematic::~FourSwedishWheelOmniBaseKinematic |
( |
| ) |
|
|
virtual |
| void youbot::FourSwedishWheelOmniBaseKinematic::cartesianPositionToWheelPositions |
( |
const quantity< si::length > & |
longitudinalPosition, |
|
|
const quantity< si::length > & |
transversalPosition, |
|
|
const quantity< plane_angle > & |
orientation, |
|
|
std::vector< quantity< plane_angle > > & |
wheelPositions |
|
) |
| |
|
virtual |
Calculates from the cartesian position the wheel positions
- Parameters
-
| longitudinalPosition | is the forward or backward position |
| transversalPosition | is the sideway position |
| orientation | is the rotation around the center |
| wheelPositions | are the individual positions of the wheels |
Definition at line 184 of file FourSwedishWheelOmniBaseKinematic.cpp.
| void youbot::FourSwedishWheelOmniBaseKinematic::cartesianVelocityToWheelVelocities |
( |
const quantity< si::velocity > & |
longitudinalVelocity, |
|
|
const quantity< si::velocity > & |
transversalVelocity, |
|
|
const quantity< si::angular_velocity > & |
angularVelocity, |
|
|
std::vector< quantity< angular_velocity > > & |
wheelVelocities |
|
) |
| |
|
virtual |
Calculates from the cartesian velocity the individual wheel velocities
- Parameters
-
| longitudinalVelocity | is the forward or backward velocity |
| transversalVelocity | is the sideway velocity |
| angularVelocity | is the rotational velocity around the center of the YouBot |
| wheelVelocities | are the individual wheel velocities |
Definition at line 70 of file FourSwedishWheelOmniBaseKinematic.cpp.
| void youbot::FourSwedishWheelOmniBaseKinematic::wheelPositionsToCartesianPosition |
( |
const std::vector< quantity< plane_angle > > & |
wheelPositions, |
|
|
quantity< si::length > & |
longitudinalPosition, |
|
|
quantity< si::length > & |
transversalPosition, |
|
|
quantity< plane_angle > & |
orientation |
|
) |
| |
|
virtual |
Calculates from the wheel positions the cartesian position
- Parameters
-
| wheelPositions | are the individual positions of the wheels |
| longitudinalPosition | is the forward or backward position |
| transversalPosition | is the sideway position |
| orientation | is the rotation around the center |
Implements youbot::WheeledBaseKinematic.
Definition at line 130 of file FourSwedishWheelOmniBaseKinematic.cpp.
| void youbot::FourSwedishWheelOmniBaseKinematic::wheelVelocitiesToCartesianVelocity |
( |
const std::vector< quantity< angular_velocity > > & |
wheelVelocities, |
|
|
quantity< si::velocity > & |
longitudinalVelocity, |
|
|
quantity< si::velocity > & |
transversalVelocity, |
|
|
quantity< angular_velocity > & |
angularVelocity |
|
) |
| |
|
virtual |
Calculates from the wheel velocities the cartesian velocity
- Parameters
-
| wheelVelocities | are the velocities of the individual wheels |
| longitudinalVelocity | is the forward or backward velocity |
| transversalVelocity | is the sideway velocity |
| angularVelocity | is the rotational velocity around the center of the YouBot |
Implements youbot::WheeledBaseKinematic.
Definition at line 103 of file FourSwedishWheelOmniBaseKinematic.cpp.
| quantity<plane_angle> youbot::FourSwedishWheelOmniBaseKinematic::angle |
|
private |
| bool youbot::FourSwedishWheelOmniBaseKinematic::lastWheelPositionInitialized |
|
private |
| std::vector<quantity<plane_angle> > youbot::FourSwedishWheelOmniBaseKinematic::lastWheelPositions |
|
private |
| quantity<si::length> youbot::FourSwedishWheelOmniBaseKinematic::longitudinalPos |
|
private |
| quantity<si::length> youbot::FourSwedishWheelOmniBaseKinematic::transversalPos |
|
private |
The documentation for this class was generated from the following files:
 Public Member Functions inherited from youbot::WheeledBaseKinematic
Public Member Functions inherited from youbot::WheeledBaseKinematic