Velocity smoother implementation. More...
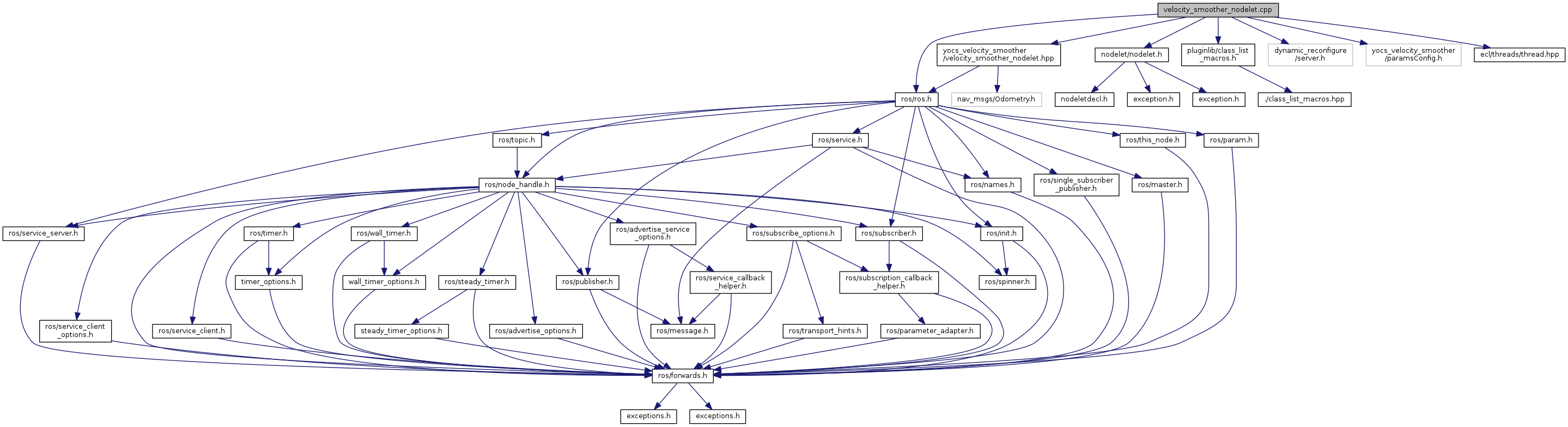
#include <ros/ros.h>#include <nodelet/nodelet.h>#include <pluginlib/class_list_macros.h>#include <dynamic_reconfigure/server.h>#include <yocs_velocity_smoother/paramsConfig.h>#include <ecl/threads/thread.hpp>#include "yocs_velocity_smoother/velocity_smoother_nodelet.hpp"
Include dependency graph for velocity_smoother_nodelet.cpp:
Go to the source code of this file.
Classes | |
| class | yocs_velocity_smoother::VelocitySmootherNodelet |
Namespaces | |
| yocs_velocity_smoother | |
Macros | |
| #define | IS_ZERO_VEOCITY(a) ((a.linear.x == 0.0) && (a.angular.z == 0.0)) |
| #define | PERIOD_RECORD_SIZE 5 |
| #define | ZERO_VEL_COMMAND geometry_msgs::Twist(); |
Functions | |
| PLUGINLIB_EXPORT_CLASS (yocs_velocity_smoother::VelocitySmootherNodelet, nodelet::Nodelet) | |
Detailed Description
Velocity smoother implementation.
License: BSD https://raw.github.com/yujinrobot/yujin_ocs/hydro/yocs_velocity_smoother/LICENSE
Definition in file velocity_smoother_nodelet.cpp.
Macro Definition Documentation
| #define IS_ZERO_VEOCITY | ( | a | ) | ((a.linear.x == 0.0) && (a.angular.z == 0.0)) |
Definition at line 30 of file velocity_smoother_nodelet.cpp.
| #define PERIOD_RECORD_SIZE 5 |
Definition at line 28 of file velocity_smoother_nodelet.cpp.
| #define ZERO_VEL_COMMAND geometry_msgs::Twist(); |
Definition at line 29 of file velocity_smoother_nodelet.cpp.
Function Documentation
| PLUGINLIB_EXPORT_CLASS | ( | yocs_velocity_smoother::VelocitySmootherNodelet | , |
| nodelet::Nodelet | |||
| ) |