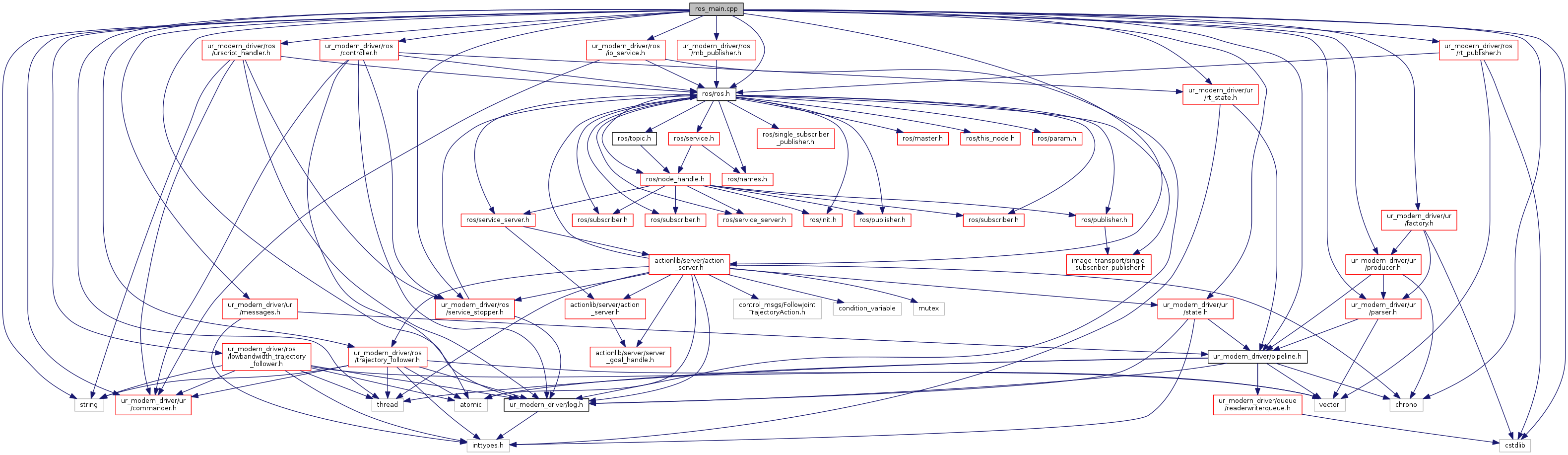
#include <ros/ros.h>#include <chrono>#include <cstdlib>#include <string>#include <thread>#include "ur_modern_driver/log.h"#include "ur_modern_driver/pipeline.h"#include "ur_modern_driver/ros/action_server.h"#include "ur_modern_driver/ros/controller.h"#include "ur_modern_driver/ros/io_service.h"#include "ur_modern_driver/ros/lowbandwidth_trajectory_follower.h"#include "ur_modern_driver/ros/mb_publisher.h"#include "ur_modern_driver/ros/rt_publisher.h"#include "ur_modern_driver/ros/service_stopper.h"#include "ur_modern_driver/ros/trajectory_follower.h"#include "ur_modern_driver/ros/urscript_handler.h"#include "ur_modern_driver/ur/commander.h"#include "ur_modern_driver/ur/factory.h"#include "ur_modern_driver/ur/messages.h"#include "ur_modern_driver/ur/parser.h"#include "ur_modern_driver/ur/producer.h"#include "ur_modern_driver/ur/rt_state.h"#include "ur_modern_driver/ur/state.h"
Include dependency graph for ros_main.cpp:
Go to the source code of this file.
Classes | |
| class | IgnorePipelineStoppedNotifier |
| struct | ProgArgs |
| class | ShutdownOnPipelineStoppedNotifier |
Functions | |
| static const std::string | BASE_FRAME_ARG ("~base_frame") |
| std::string | getLocalIPAccessibleFromHost (std::string &host) |
| static const std::string | IP_ADDR_ARG ("~robot_ip_address") |
| static const std::string | JOINT_NAMES_PARAM ("hardware_interface/joints") |
| static const std::string | LOW_BANDWIDTH_TRAJECTORY_FOLLOWER ("~use_lowbandwidth_trajectory_follower") |
| int | main (int argc, char **argv) |
| static const std::string | MAX_VEL_CHANGE_ARG ("~max_vel_change") |
| bool | parse_args (ProgArgs &args) |
| static const std::string | PREFIX_ARG ("~prefix") |
| static const std::string | REVERSE_IP_ADDR_ARG ("~reverse_ip_address") |
| static const std::string | REVERSE_PORT_ARG ("~reverse_port") |
| static const std::string | ROS_CONTROL_ARG ("~use_ros_control") |
| static const std::string | SHUTDOWN_ON_DISCONNECT_ARG ("~shutdown_on_disconnect") |
| static const std::string | TCP_LINK_ARG ("~tcp_link") |
| static const std::string | TOOL_FRAME_ARG ("~tool_frame") |
Variables | |
| static const std::vector< std::string > | DEFAULT_JOINTS |
| static const int | UR_RT_PORT = 30003 |
| static const int | UR_SECONDARY_PORT = 30002 |
Function Documentation
|
static |
| std::string getLocalIPAccessibleFromHost | ( | std::string & | host | ) |
Definition at line 134 of file ros_main.cpp.
|
static |
|
static |
|
static |
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 140 of file ros_main.cpp.
|
static |
| bool parse_args | ( | ProgArgs & | args | ) |
Definition at line 112 of file ros_main.cpp.
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
Variable Documentation
|
static |
Initial value:
= { "shoulder_pan_joint", "shoulder_lift_joint", "elbow_joint",
"wrist_1_joint", "wrist_2_joint", "wrist_3_joint" }
Definition at line 59 of file ros_main.cpp.
|
static |
Definition at line 63 of file ros_main.cpp.
|
static |
Definition at line 62 of file ros_main.cpp.