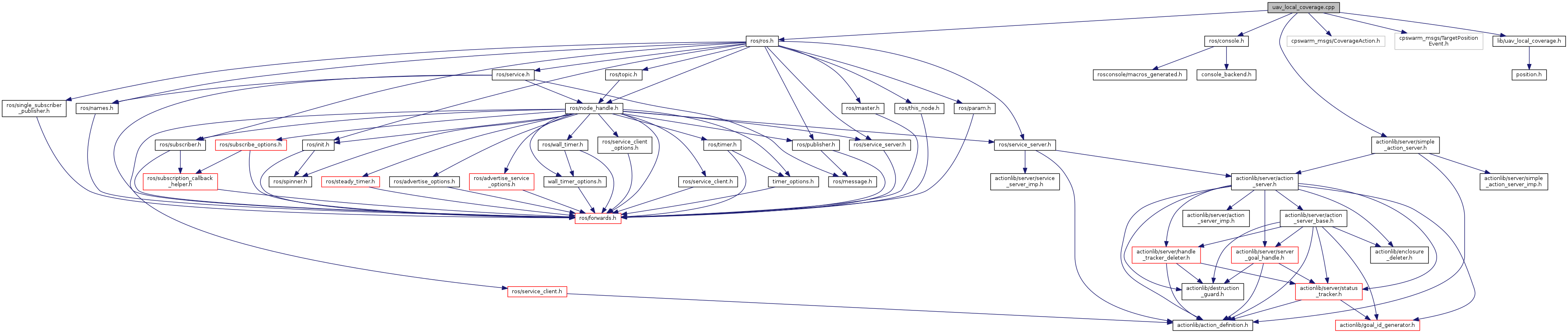
#include <ros/ros.h>#include <ros/console.h>#include <actionlib/server/simple_action_server.h>#include <cpswarm_msgs/CoverageAction.h>#include <cpswarm_msgs/TargetPositionEvent.h>#include "lib/uav_local_coverage.h"
Include dependency graph for uav_local_coverage.cpp:
Go to the source code of this file.
Typedefs | |
| typedef actionlib::SimpleActionServer< cpswarm_msgs::CoverageAction > | action_server_t |
| An action server type that allows to start and stop the local coverage task. More... | |
Functions | |
| void | ActionCallback (const cpswarm_msgs::CoverageGoalConstPtr &goal, action_server_t *as) |
| Callback of the action server which executes the local coverage task until it is preempted or finished. More... | |
| void | found_callback (const cpswarm_msgs::TargetPositionEvent::ConstPtr &msg) |
| Callback function to receive details of a target that has been detected. More... | |
| int | main (int argc, char **argv) |
| Main function to be executed by ROS. More... | |
Variables | |
| cpswarm_msgs::CoverageResult | result |
| The target found during execution of the coverage algorithm. More... | |
| behavior_state_t | state |
| The state of the behavior algorithm. More... | |
Typedef Documentation
| typedef actionlib::SimpleActionServer<cpswarm_msgs::CoverageAction> action_server_t |
An action server type that allows to start and stop the local coverage task.
Definition at line 23 of file uav_local_coverage.cpp.
Function Documentation
| void ActionCallback | ( | const cpswarm_msgs::CoverageGoalConstPtr & | goal, |
| action_server_t * | as | ||
| ) |
Callback of the action server which executes the local coverage task until it is preempted or finished.
- Parameters
-
goal The goal message received from the action client. as The action server offered by this node.
Definition at line 30 of file uav_local_coverage.cpp.
| void found_callback | ( | const cpswarm_msgs::TargetPositionEvent::ConstPtr & | msg | ) |
Callback function to receive details of a target that has been detected.
- Parameters
-
msg ID and position of target.
Definition at line 82 of file uav_local_coverage.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Main function to be executed by ROS.
- Parameters
-
argc Number of command line arguments. argv Array of command line arguments.
- Returns
- Success.
Definition at line 95 of file uav_local_coverage.cpp.
Variable Documentation
| cpswarm_msgs::CoverageResult result |
The target found during execution of the coverage algorithm.
Definition at line 18 of file uav_local_coverage.cpp.
| behavior_state_t state |
The state of the behavior algorithm.
Definition at line 13 of file uav_local_coverage.cpp.