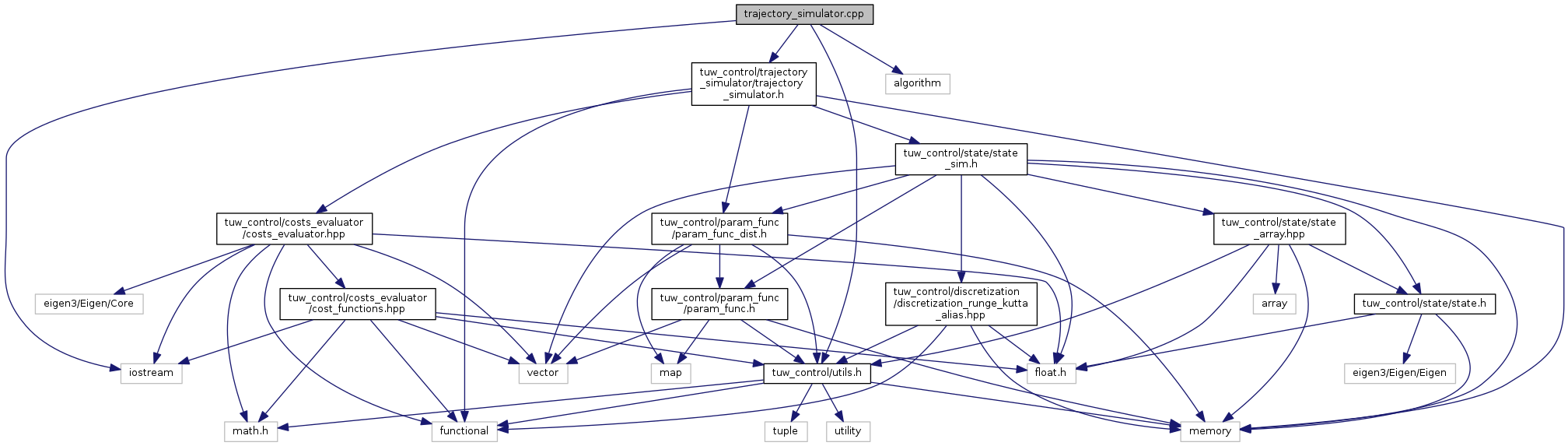
#include <tuw_control/trajectory_simulator/trajectory_simulator.h>#include <tuw_control/utils.h>#include <algorithm>#include <iostream>
Include dependency graph for trajectory_simulator.cpp:
Go to the source code of this file.
Typedefs | |
| using | BSLT = TrajectorySimulator::BaseSimLatticeType |
Functions | |
| bool | cmpLatticePt (const TrajectorySimulator::LatticePoint &a, const TrajectorySimulator::LatticePoint &b) |
Typedef Documentation
Definition at line 43 of file trajectory_simulator.cpp.
Function Documentation
| bool cmpLatticePt | ( | const TrajectorySimulator::LatticePoint & | a, |
| const TrajectorySimulator::LatticePoint & | b | ||
| ) |
Definition at line 159 of file trajectory_simulator.cpp.