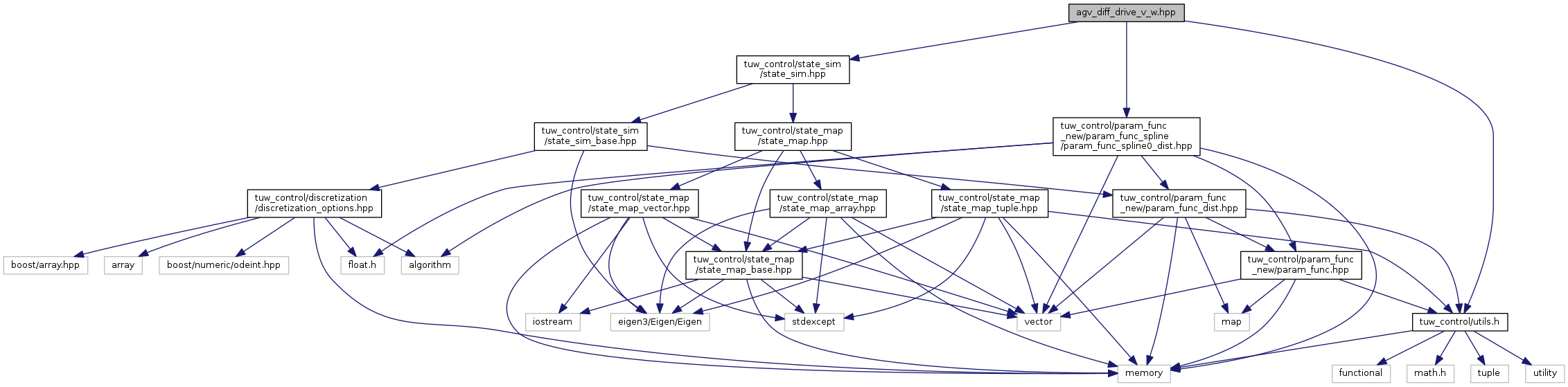
#include <tuw_control/state_sim/state_sim.hpp>#include <tuw_control/param_func_new/param_func_spline/param_func_spline0_dist.hpp>#include <tuw_control/utils.h>
Include dependency graph for agv_diff_drive_v_w.hpp:
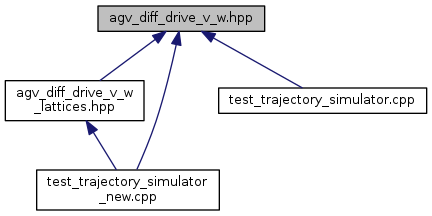
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| tuw | |
| tuw::DiffDrive | |
Typedefs | |
| template<class TNumType > | |
| using | tuw::DiffDrive::StateVW = StateMap< TNumType, StateNmVW, StateCfVW > |
| Simple full system state [xNm,xCf]. More... | |
| template<class TNumType > | |
| using | tuw::DiffDrive::StateWithGradVW = StateWithGradMap< TNumType, StateNmVW, StateCfVW, OptVarStructVW > |
| Full system state, with derivatives [[xNm,L],xCf, d/dp([xNm,L]), d/dp(xCf)]. More... | |
| template<class TNumType > | |
| using | tuw::DiffDrive::StateWithLVW = StateMap< TNumType, StateNmWithLVW, StateCfVW > |
| Full system state including scalar objective function [[xNm,L],xCf]. More... | |
| template<class TNumType > | |
| using | tuw::DiffDrive::StateWithLWithGradVW = StateWithGradMap< TNumType, StateNmWithLVW, StateCfVW, OptVarStructVW > |
| Full system state including scalar objective function, with derivatives [[xNm,L],xCf, d/dp([xNm,L]), d/dp(xCf)]. More... | |
Variables | |
| static constexpr const size_t | tuw::DiffDrive::optParamBlockSize = 3 |