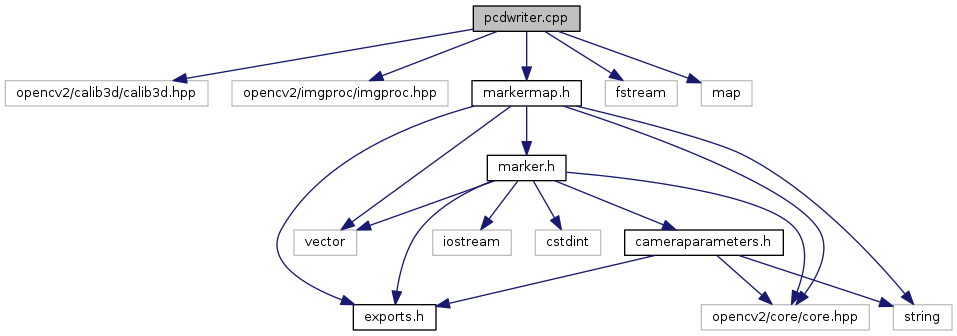
#include <opencv2/calib3d/calib3d.hpp>#include <opencv2/imgproc/imgproc.hpp>#include "markermap.h"#include <fstream>#include <map>
Include dependency graph for pcdwriter.cpp:
Go to the source code of this file.
Classes | |
| struct | Quaternion |
Functions | |
| vector< cv::Vec4f > | getMarkerIdPcd (aruco::Marker3DInfo &minfo, cv::Scalar color) |
| std::vector< cv::Vec4f > | getPcdPoints (const vector< cv::Point3f > &mpoints, cv::Scalar color, int npoints=100) |
| void | getRTfromMatrix44 (const cv::Mat &M, cv::Mat &R, cv::Mat &T) |
| cv::Mat | getRTMatrix (const cv::Mat &R_, const cv::Mat &T_, int forceType=-1) |
| cv::Point3f | mult (const cv::Mat &m, cv::Point3f p) |
| float | rigidBodyTransformation_Horn1987 (cv::Mat &S, cv::Mat &M, cv::Mat &RT_4x4) |
| float | rigidBodyTransformation_Horn1987 (cv::Mat &_s, cv::Mat &_m, cv::Mat &Rvec, cv::Mat &Tvec) |
| float | rigidBodyTransformation_Horn1987 (const vector< cv::Point3f > &orgPoints_32FC3, const vector< cv::Point3f > &dstPoints_32FC3, cv::Mat &Rvec, cv::Mat &Tvec) |
| cv::Mat | rigidBodyTransformation_Horn1987 (const std::vector< cv::Point3f > &org, const std::vector< cv::Point3f > &dst, double *err=0) |
| void | savePCDFile (string fpath, const aruco::MarkerMap &ms, const std::map< int, cv::Mat > frame_pose_map) throw (std::exception) |
Function Documentation
| vector<cv::Vec4f> getMarkerIdPcd | ( | aruco::Marker3DInfo & | minfo, |
| cv::Scalar | color | ||
| ) |
Definition at line 291 of file pcdwriter.cpp.
| std::vector<cv::Vec4f> getPcdPoints | ( | const vector< cv::Point3f > & | mpoints, |
| cv::Scalar | color, | ||
| int | npoints = 100 |
||
| ) |
Definition at line 250 of file pcdwriter.cpp.
| void getRTfromMatrix44 | ( | const cv::Mat & | M, |
| cv::Mat & | R, | ||
| cv::Mat & | T | ||
| ) |
Definition at line 11 of file pcdwriter.cpp.
| cv::Mat getRTMatrix | ( | const cv::Mat & | R_, |
| const cv::Mat & | T_, | ||
| int | forceType = -1 |
||
| ) |
Definition at line 177 of file pcdwriter.cpp.
| cv::Point3f mult | ( | const cv::Mat & | m, |
| cv::Point3f | p | ||
| ) |
Definition at line 230 of file pcdwriter.cpp.
| float rigidBodyTransformation_Horn1987 | ( | cv::Mat & | S, |
| cv::Mat & | M, | ||
| cv::Mat & | RT_4x4 | ||
| ) |
Definition at line 64 of file pcdwriter.cpp.
| float rigidBodyTransformation_Horn1987 | ( | cv::Mat & | _s, |
| cv::Mat & | _m, | ||
| cv::Mat & | Rvec, | ||
| cv::Mat & | Tvec | ||
| ) |
Definition at line 157 of file pcdwriter.cpp.
| float rigidBodyTransformation_Horn1987 | ( | const vector< cv::Point3f > & | orgPoints_32FC3, |
| const vector< cv::Point3f > & | dstPoints_32FC3, | ||
| cv::Mat & | Rvec, | ||
| cv::Mat & | Tvec | ||
| ) |
Definition at line 165 of file pcdwriter.cpp.
| cv::Mat rigidBodyTransformation_Horn1987 | ( | const std::vector< cv::Point3f > & | org, |
| const std::vector< cv::Point3f > & | dst, | ||
| double * | err = 0 |
||
| ) |
Definition at line 221 of file pcdwriter.cpp.
| void savePCDFile | ( | string | fpath, |
| const aruco::MarkerMap & | ms, | ||
| const std::map< int, cv::Mat > | frame_pose_map | ||
| ) | |||
| throw | ( | std::exception | |
| ) | |||
Definition at line 335 of file pcdwriter.cpp.