#include <iostream>#include <fstream>#include <sstream>#include <string>#include <opencv2/highgui/highgui.hpp>#include <opencv2/imgproc/imgproc.hpp>#include "aruco.h"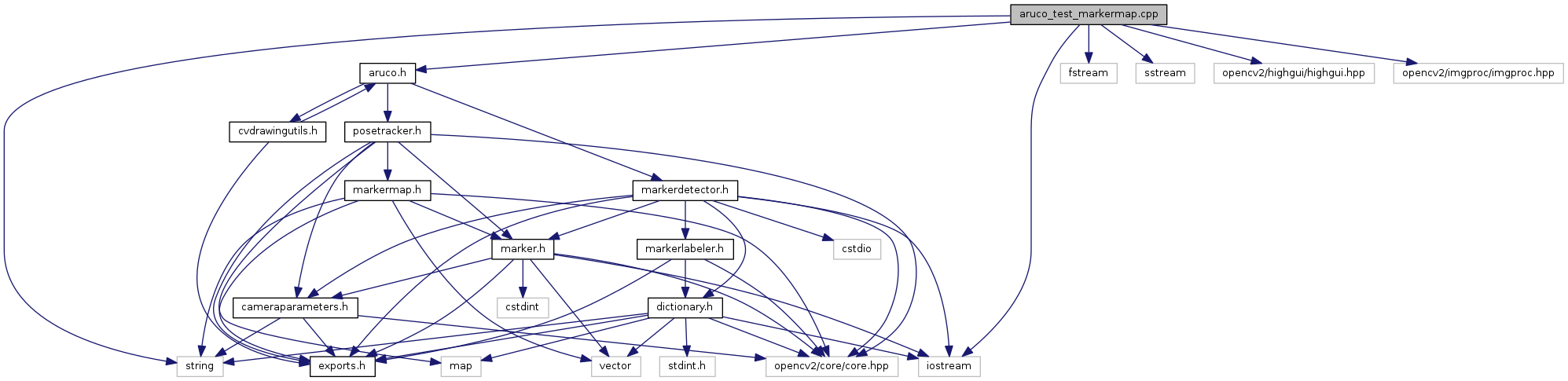
Go to the source code of this file.
Classes | |
| class | CmdLineParser |
Functions | |
| void | cvTackBarEvents (int pos, void *) |
| void | getQuaternionAndTranslationfromMatrix44 (const cv::Mat &M_in, float &qx, float &qy, float &qz, float &qw, float &tx, float &ty, float &tz) |
| int | main (int argc, char **argv) |
| float | NORM (float a, float b, float c, float d) |
| void | processKey (char k) |
| void | savePCDFile (string fpath, const aruco::MarkerMap &ms, const std::map< int, cv::Mat > frame_pose_map) throw (std::exception) |
| void | savePosesToFile (string filename, const std::map< int, cv::Mat > &fmp) |
| float | SIGN (float x) |
Variables | |
| std::map< int, cv::Mat > | frame_pose_map |
| int | iThresParam1 |
| int | iThresParam2 |
| bool | The3DInfoAvailable = false |
| CameraParameters | TheCameraParameters |
| Mat | TheInputImage |
| Mat | TheInputImageCopy |
| MarkerDetector | TheMarkerDetector |
| MarkerMap | TheMarkerMapConfig |
| string | TheMarkerMapConfigFile |
| float | TheMarkerSize = -1 |
| MarkerMapPoseTracker | TheMSPoseTracker |
| VideoCapture | TheVideoCapturer |
| double | ThresParam1 |
| double | ThresParam2 |
| int | waitTime = 10 |
Function Documentation
| void cvTackBarEvents | ( | int | pos, |
| void * | |||
| ) |
Definition at line 201 of file aruco_test_markermap.cpp.
| void getQuaternionAndTranslationfromMatrix44 | ( | const cv::Mat & | M_in, |
| float & | qx, | ||
| float & | qy, | ||
| float & | qz, | ||
| float & | qw, | ||
| float & | tx, | ||
| float & | ty, | ||
| float & | tz | ||
| ) |
Definition at line 238 of file aruco_test_markermap.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
DO NOT FORGET THAT!!! Otherwise, the ARUCO dictionary will be used by default!
Definition at line 85 of file aruco_test_markermap.cpp.
|
inline |
Definition at line 235 of file aruco_test_markermap.cpp.
| void processKey | ( | char | k | ) |
Definition at line 67 of file aruco_test_markermap.cpp.
| void savePCDFile | ( | string | fpath, |
| const aruco::MarkerMap & | ms, | ||
| const std::map< int, cv::Mat > | frame_pose_map | ||
| ) | |||
| throw | ( | std::exception | |
| ) | |||
Definition at line 335 of file pcdwriter.cpp.
| void savePosesToFile | ( | string | filename, |
| const std::map< int, cv::Mat > & | fmp | ||
| ) |
Definition at line 304 of file aruco_test_markermap.cpp.
|
inline |
Definition at line 234 of file aruco_test_markermap.cpp.
Variable Documentation
| std::map<int,cv::Mat> frame_pose_map |
Definition at line 51 of file aruco_test_markermap.cpp.
| int iThresParam1 |
Definition at line 49 of file aruco_test_markermap.cpp.
| int iThresParam2 |
Definition at line 49 of file aruco_test_markermap.cpp.
| bool The3DInfoAvailable = false |
Definition at line 39 of file aruco_test_markermap.cpp.
| CameraParameters TheCameraParameters |
Definition at line 43 of file aruco_test_markermap.cpp.
| Mat TheInputImage |
Definition at line 42 of file aruco_test_markermap.cpp.
| Mat TheInputImageCopy |
Definition at line 42 of file aruco_test_markermap.cpp.
| MarkerDetector TheMarkerDetector |
Definition at line 45 of file aruco_test_markermap.cpp.
| MarkerMap TheMarkerMapConfig |
Definition at line 44 of file aruco_test_markermap.cpp.
| string TheMarkerMapConfigFile |
Definition at line 38 of file aruco_test_markermap.cpp.
| float TheMarkerSize = -1 |
Definition at line 40 of file aruco_test_markermap.cpp.
| MarkerMapPoseTracker TheMSPoseTracker |
Definition at line 46 of file aruco_test_markermap.cpp.
| VideoCapture TheVideoCapturer |
Definition at line 41 of file aruco_test_markermap.cpp.
| double ThresParam1 |
Definition at line 48 of file aruco_test_markermap.cpp.
| double ThresParam2 |
Definition at line 48 of file aruco_test_markermap.cpp.
| int waitTime = 10 |
Definition at line 50 of file aruco_test_markermap.cpp.