A interface for the the system dynamics of a legged robot. More...
#include <dynamic_model.h>
Public Types | |
| using | AngVel = Eigen::Vector3d |
| using | BaseAcc = Eigen::Matrix< double, 6, 1 > |
| using | ComPos = Eigen::Vector3d |
| using | EE = uint |
| using | EELoad = EEPos |
| using | EEPos = std::vector< Eigen::Vector3d > |
| using | Jac = Eigen::SparseMatrix< double, Eigen::RowMajor > |
| using | Matrix3d = Eigen::Matrix3d |
| using | Ptr = std::shared_ptr< DynamicModel > |
| using | Vector3d = Eigen::Vector3d |
Public Member Functions | |
| double | g () const |
| virtual BaseAcc | GetDynamicViolation () const =0 |
| The violation of the system dynamics incurred by the current values. More... | |
| int | GetEECount () const |
| the number of endeffectors that this robot has. More... | |
| virtual Jac | GetJacobianWrtBaseAng (const EulerConverter &base_angular, double t) const =0 |
| How the base orientation affects the dynamic violation. More... | |
| virtual Jac | GetJacobianWrtBaseLin (const Jac &jac_base_lin_pos, const Jac &jac_base_lin_acc) const =0 |
| How the base position affects the dynamic violation. More... | |
| virtual Jac | GetJacobianWrtEEPos (const Jac &ee_pos, EE ee) const =0 |
| How the endeffector positions affect the dynamic violation. More... | |
| virtual Jac | GetJacobianWrtForce (const Jac &ee_force, EE ee) const =0 |
| How the endeffector forces affect the dynamic violation. More... | |
| double | m () const |
| void | SetCurrent (const ComPos &com_W, const Vector3d com_acc_W, const Matrix3d &w_R_b, const AngVel &omega_W, const Vector3d &omega_dot_W, const EELoad &force_W, const EEPos &pos_W) |
| Sets the current state and input of the system. More... | |
Protected Member Functions | |
| DynamicModel (double mass, int ee_count) | |
| Construct a dynamic object. Protected as this is abstract base class. More... | |
| virtual | ~DynamicModel ()=default |
Protected Attributes | |
| Vector3d | com_acc_ |
| x-y-z acceleration of the Center-of-Mass. More... | |
| ComPos | com_pos_ |
| x-y-z position of the Center-of-Mass. More... | |
| EELoad | ee_force_ |
| The endeffector force expressed in world frame. More... | |
| EEPos | ee_pos_ |
| The x-y-z position of each endeffector. More... | |
| AngVel | omega_ |
| angular velocity expressed in world frame. More... | |
| Vector3d | omega_dot_ |
| angular acceleration expressed in world frame. More... | |
| Matrix3d | w_R_b_ |
| rotation matrix from base (b) to world (w) frame. More... | |
Private Attributes | |
| double | g_ |
| gravity acceleration [m/s^2] More... | |
| double | m_ |
| mass of the robot More... | |
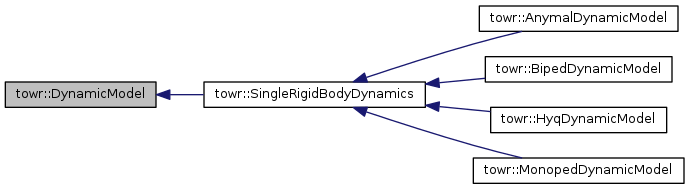
Detailed Description
A interface for the the system dynamics of a legged robot.
This class is responsible for verifying that the current acceleration of a system given a specific robot state and input forces ensure the system dynamics, so g = xdd(t) - f(x(t), f(t)).
Dynamic models can for example be: Linear Inverted Pendulum (LIP), SingleRigidBodyDynamics (SRBD), Centroidal Dynamics, Full Rigid Body Dynamics (RBD).
An overview of all these models can be found here: https://doi.org/10.3929/ethz-b-000272432
This model is used in DynamicConstraint to ensure that the optimized motion trajectory complies to this. Currently, only SingleRigidBodyDynamics is implemented.
Definition at line 66 of file dynamic_model.h.
Member Typedef Documentation
| using towr::DynamicModel::AngVel = Eigen::Vector3d |
Definition at line 72 of file dynamic_model.h.
| using towr::DynamicModel::BaseAcc = Eigen::Matrix<double,6,1> |
Definition at line 73 of file dynamic_model.h.
| using towr::DynamicModel::ComPos = Eigen::Vector3d |
Definition at line 71 of file dynamic_model.h.
| using towr::DynamicModel::EE = uint |
Definition at line 77 of file dynamic_model.h.
| using towr::DynamicModel::EELoad = EEPos |
Definition at line 76 of file dynamic_model.h.
| using towr::DynamicModel::EEPos = std::vector<Eigen::Vector3d> |
Definition at line 75 of file dynamic_model.h.
| using towr::DynamicModel::Jac = Eigen::SparseMatrix<double, Eigen::RowMajor> |
Definition at line 74 of file dynamic_model.h.
| using towr::DynamicModel::Matrix3d = Eigen::Matrix3d |
Definition at line 70 of file dynamic_model.h.
| using towr::DynamicModel::Ptr = std::shared_ptr<DynamicModel> |
Definition at line 68 of file dynamic_model.h.
| using towr::DynamicModel::Vector3d = Eigen::Vector3d |
Definition at line 69 of file dynamic_model.h.
Constructor & Destructor Documentation
|
protected |
Construct a dynamic object. Protected as this is abstract base class.
- Parameters
-
mass The mass of the system.
Definition at line 34 of file dynamic_model.cc.
|
protectedvirtualdefault |
Member Function Documentation
|
inline |
- Returns
- The gravity acceleration [m/s^2] (positive)
Definition at line 144 of file dynamic_model.h.
|
pure virtual |
The violation of the system dynamics incurred by the current values.
- Returns
- The 6-dimension generalized force violation (angular + linear).
Implemented in towr::SingleRigidBodyDynamics.
|
inline |
the number of endeffectors that this robot has.
Definition at line 154 of file dynamic_model.h.
|
pure virtual |
How the base orientation affects the dynamic violation.
- Parameters
-
base_angular provides Euler angles Jacobians. t Time at which euler angles values are queried.
- Returns
- The 6xn Jacobian of dynamic violations with respect to variables defining the base angular spline (e.g. node values).
Implemented in towr::SingleRigidBodyDynamics.
|
pure virtual |
How the base position affects the dynamic violation.
- Parameters
-
jac_base_lin_pos The 3xn Jacobian of the base linear position. jac_base_lin_acc The 3xn Jacobian of the base linear acceleration.
- Returns
- The 6xn Jacobian of dynamic violations with respect to variables defining the base linear spline (e.g. node values).
Implemented in towr::SingleRigidBodyDynamics.
|
pure virtual |
How the endeffector positions affect the dynamic violation.
- Parameters
-
ee_force The 3xn Jacobian of the foot position x,y,z. ee The endeffector for which the senstivity is required.
- Returns
- The 6xn Jacobian of dynamic violations with respect to variables defining the foot positions (e.g. node values).
Implemented in towr::SingleRigidBodyDynamics.
|
pure virtual |
How the endeffector forces affect the dynamic violation.
- Parameters
-
ee_force The 3xn Jacobian of the foot force x,y,z. ee The endeffector for which the senstivity is required.
- Returns
- The 6xn Jacobian of dynamic violations with respect to variables defining the endeffector forces (e.g. node values).
Implemented in towr::SingleRigidBodyDynamics.
|
inline |
- Returns
- The mass of the robot [kg].
Definition at line 149 of file dynamic_model.h.
| void towr::DynamicModel::SetCurrent | ( | const ComPos & | com_W, |
| const Vector3d | com_acc_W, | ||
| const Matrix3d & | w_R_b, | ||
| const AngVel & | omega_W, | ||
| const Vector3d & | omega_dot_W, | ||
| const EELoad & | force_W, | ||
| const EEPos & | pos_W | ||
| ) |
Sets the current state and input of the system.
- Parameters
-
com_W Current Center-of-Mass (x,y,z) position in world frame. com_acc_W Current Center-of-Mass (x,y,z) acceleration in world. w_R_b Current rotation from base to world frame. omega_W Current angular velocity in world frame. omega_dot_W Current angular acceleration in world frame. force_W Force at each foot expressed in world frame. pos_W Position of each foot expressed in world frame
Definition at line 51 of file dynamic_model.cc.
Member Data Documentation
|
protected |
x-y-z acceleration of the Center-of-Mass.
Definition at line 158 of file dynamic_model.h.
|
protected |
x-y-z position of the Center-of-Mass.
Definition at line 154 of file dynamic_model.h.
|
protected |
The endeffector force expressed in world frame.
Definition at line 165 of file dynamic_model.h.
|
protected |
The x-y-z position of each endeffector.
Definition at line 164 of file dynamic_model.h.
|
private |
gravity acceleration [m/s^2]
Definition at line 175 of file dynamic_model.h.
|
private |
mass of the robot
Definition at line 176 of file dynamic_model.h.
|
protected |
angular velocity expressed in world frame.
Definition at line 161 of file dynamic_model.h.
|
protected |
angular acceleration expressed in world frame.
Definition at line 162 of file dynamic_model.h.
|
protected |
rotation matrix from base (b) to world (w) frame.
Definition at line 160 of file dynamic_model.h.
The documentation for this class was generated from the following files: