This defines a underconstrained goal update filter. It forces the goal cartesian tool pose into the task space. More...
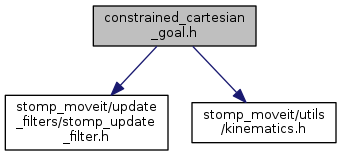
#include <stomp_moveit/update_filters/stomp_update_filter.h>#include <stomp_moveit/utils/kinematics.h>
Include dependency graph for constrained_cartesian_goal.h:
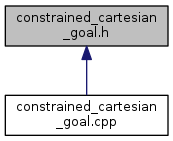
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | stomp_moveit::update_filters::ConstrainedCartesianGoal |
| Forces the goal cartesian tool pose into the task space. More... | |
Namespaces | |
| stomp_moveit | |
| stomp_moveit::update_filters | |
Detailed Description
This defines a underconstrained goal update filter. It forces the goal cartesian tool pose into the task space.
- Date
- June 3, 2016
- Version
- TODO
- Bug:
- No known bugs
- Copyright
- Copyright (c) 2016, Southwest Research Institute
- License
- Software License Agreement (Apache License)
- Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with the License. You may obtain a copy of the License at http://www.apache.org/licenses/LICENSE-2.0
- Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the specific language governing permissions and limitations under the License.
Definition in file constrained_cartesian_goal.h.