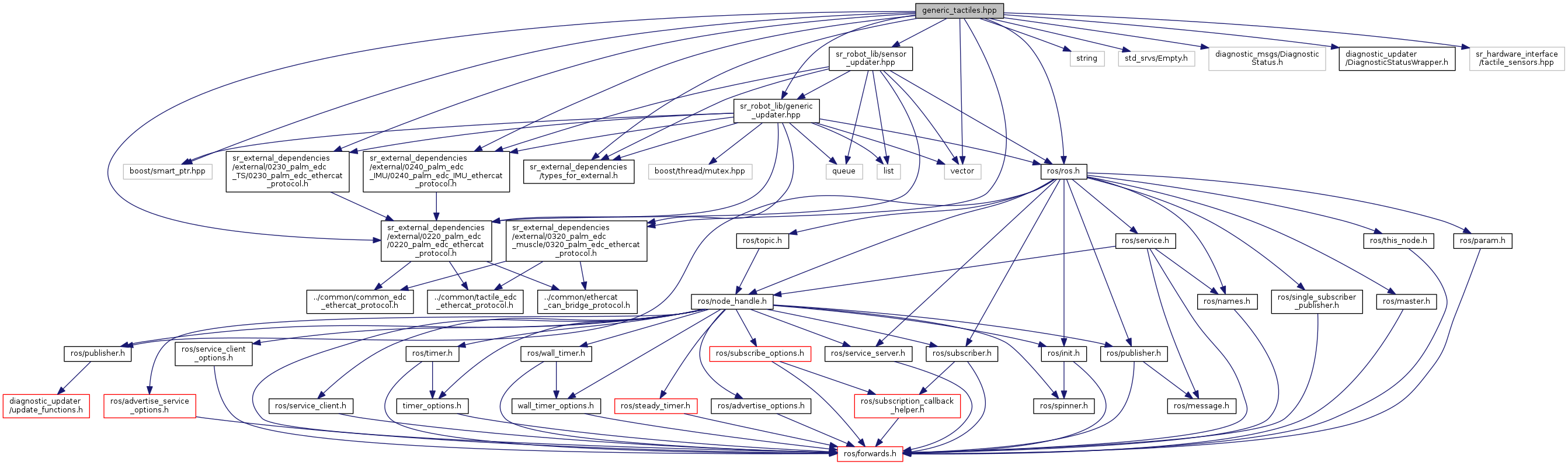
#include <boost/smart_ptr.hpp>#include <sr_external_dependencies/types_for_external.h>#include <sr_external_dependencies/external/0220_palm_edc/0220_palm_edc_ethercat_protocol.h>#include <sr_external_dependencies/external/0230_palm_edc_TS/0230_palm_edc_ethercat_protocol.h>#include <sr_external_dependencies/external/0240_palm_edc_IMU/0240_palm_edc_IMU_ethercat_protocol.h>#include <sr_external_dependencies/external/0320_palm_edc_muscle/0320_palm_edc_ethercat_protocol.h>#include <ros/ros.h>#include <vector>#include <string>#include <std_srvs/Empty.h>#include <diagnostic_msgs/DiagnosticStatus.h>#include <diagnostic_updater/DiagnosticStatusWrapper.h>#include <sr_hardware_interface/tactile_sensors.hpp>#include "sr_robot_lib/generic_updater.hpp"#include "sr_robot_lib/sensor_updater.hpp"
Include dependency graph for generic_tactiles.hpp:
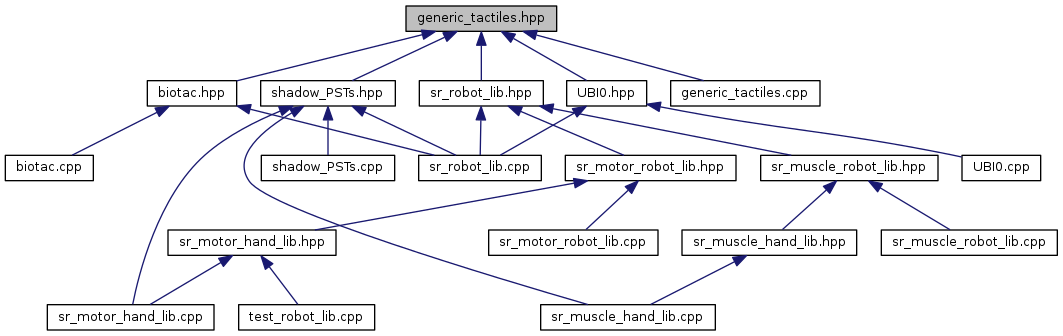
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | tactiles::GenericTactiles< StatusType, CommandType > |
Namespaces | |
| tactiles | |