#include <srh_fake_joint_calibration_controller.h>
Public Member Functions | |
| void | beginCalibration () |
| bool | calibrated () |
| virtual bool | init (ros_ethercat_model::RobotStateInterface *robot, ros::NodeHandle &n) |
| SrhFakeJointCalibrationController () | |
| virtual void | update (const ros::Time &time, const ros::Duration &period) |
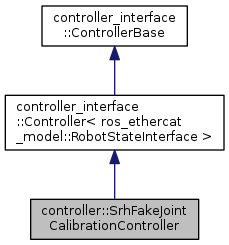
 Public Member Functions inherited from controller_interface::Controller< ros_ethercat_model::RobotStateInterface > Public Member Functions inherited from controller_interface::Controller< ros_ethercat_model::RobotStateInterface > | |
| Controller () | |
| virtual bool | init (ros_ethercat_model::RobotStateInterface *, ros::NodeHandle &, ros::NodeHandle &) |
| virtual | ~Controller () |
| Public Member Functions inherited from controller_interface::ControllerBase | |
| ControllerBase () | |
| bool | isRunning () |
| bool | isRunning () |
| virtual void | starting (const ros::Time &) |
| virtual void | starting (const ros::Time &) |
| bool | startRequest (const ros::Time &time) |
| bool | startRequest (const ros::Time &time) |
| virtual void | stopping (const ros::Time &) |
| virtual void | stopping (const ros::Time &) |
| bool | stopRequest (const ros::Time &time) |
| bool | stopRequest (const ros::Time &time) |
| void | updateRequest (const ros::Time &time, const ros::Duration &period) |
| void | updateRequest (const ros::Time &time, const ros::Duration &period) |
| virtual | ~ControllerBase () |
Protected Types | |
| enum | { IS_INITIALIZED, BEGINNING, MOVING_TO_LOW, MOVING_TO_HIGH, CALIBRATED } |
Protected Member Functions | |
| void | initialize_pids () |
| Protected Member Functions inherited from controller_interface::Controller< ros_ethercat_model::RobotStateInterface > | |
| std::string | getHardwareInterfaceType () const |
| virtual bool | initRequest (hardware_interface::RobotHW *robot_hw, ros::NodeHandle &root_nh, ros::NodeHandle &controller_nh, ClaimedResources &claimed_resources) |
Protected Attributes | |
| ros_ethercat_model::Actuator * | actuator_ |
| std::string | actuator_name_ |
| int | calibration_state_ |
| ros_ethercat_model::JointState * | joint_ |
| std::string | joint_name_ |
| std::string | joint_prefix_ |
| ros::Time | last_publish_time_ |
| ros::NodeHandle | node_ |
| std::string | ns_ |
| boost::scoped_ptr< realtime_tools::RealtimePublisher< std_msgs::Empty > > | pub_calibrated_ |
| ros_ethercat_model::RobotState * | robot_ |
| std::string | robot_id_ |
Additional Inherited Members | |
| Public Types inherited from controller_interface::ControllerBase | |
| typedef std::vector< hardware_interface::InterfaceResources > | ClaimedResources |
| Public Attributes inherited from controller_interface::ControllerBase | |
| CONSTRUCTED | |
| INITIALIZED | |
| RUNNING | |
| enum controller_interface::ControllerBase:: { ... } | state_ |
Detailed Description
Definition at line 43 of file srh_fake_joint_calibration_controller.h.
Member Enumeration Documentation
|
protected |
| Enumerator | |
|---|---|
| IS_INITIALIZED | |
| BEGINNING | |
| MOVING_TO_LOW | |
| MOVING_TO_HIGH | |
| CALIBRATED | |
Definition at line 72 of file srh_fake_joint_calibration_controller.h.
Constructor & Destructor Documentation
| controller::SrhFakeJointCalibrationController::SrhFakeJointCalibrationController | ( | ) |
Definition at line 40 of file srh_fake_joint_calibration_controller.cpp.
Member Function Documentation
|
inline |
Definition at line 58 of file srh_fake_joint_calibration_controller.h.
|
inline |
Definition at line 53 of file srh_fake_joint_calibration_controller.h.
|
virtual |
Reimplemented from controller_interface::Controller< ros_ethercat_model::RobotStateInterface >.
Definition at line 49 of file srh_fake_joint_calibration_controller.cpp.
|
protected |
Read the pids values from the parameter server and calls the service to set them on the hand.
Definition at line 155 of file srh_fake_joint_calibration_controller.cpp.
|
virtual |
Implements controller_interface::ControllerBase.
Definition at line 120 of file srh_fake_joint_calibration_controller.cpp.
Member Data Documentation
|
protected |
Definition at line 78 of file srh_fake_joint_calibration_controller.h.
|
protected |
Definition at line 81 of file srh_fake_joint_calibration_controller.h.
|
protected |
Definition at line 76 of file srh_fake_joint_calibration_controller.h.
|
protected |
Definition at line 79 of file srh_fake_joint_calibration_controller.h.
|
protected |
Definition at line 81 of file srh_fake_joint_calibration_controller.h.
|
protected |
Definition at line 81 of file srh_fake_joint_calibration_controller.h.
|
protected |
Definition at line 70 of file srh_fake_joint_calibration_controller.h.
|
protected |
Definition at line 68 of file srh_fake_joint_calibration_controller.h.
|
protected |
Definition at line 81 of file srh_fake_joint_calibration_controller.h.
|
protected |
Definition at line 69 of file srh_fake_joint_calibration_controller.h.
|
protected |
Definition at line 67 of file srh_fake_joint_calibration_controller.h.
|
protected |
Definition at line 81 of file srh_fake_joint_calibration_controller.h.
The documentation for this class was generated from the following files: