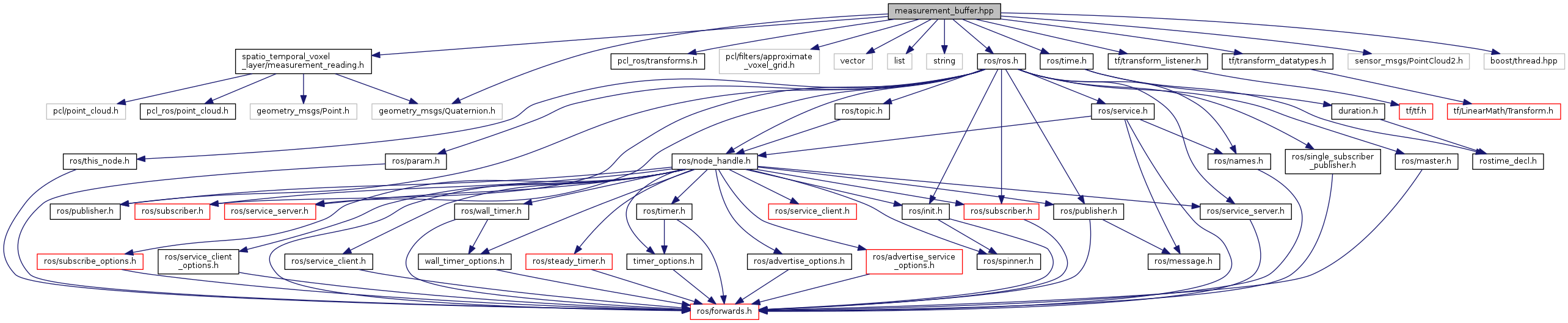
#include <spatio_temporal_voxel_layer/measurement_reading.h>#include <pcl_ros/transforms.h>#include <pcl/filters/approximate_voxel_grid.h>#include <vector>#include <list>#include <string>#include <ros/ros.h>#include <ros/time.h>#include <tf/transform_listener.h>#include <tf/transform_datatypes.h>#include <sensor_msgs/PointCloud2.h>#include <geometry_msgs/Quaternion.h>#include <boost/thread.hpp>
Include dependency graph for measurement_buffer.hpp:
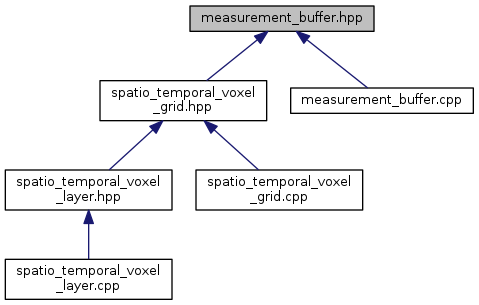
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | buffer::MeasurementBuffer |
Namespaces | |
| buffer | |
Typedefs | |
| typedef pcl::PointCloud< pcl::PointXYZ >::Ptr | buffer::point_cloud_ptr |
| typedef std::list< observation::MeasurementReading >::iterator | buffer::readings_iter |