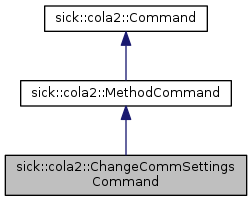
Method command class for changing the settings in the sensor. Such as which data packages to enable. More...
#include <ChangeCommSettingsCommand.h>
Public Types | |
| typedef sick::cola2::MethodCommand | base_class |
| Typedef to reference the base class. More... | |
Public Member Functions | |
| std::vector< uint8_t > | addTelegramData (const std::vector< uint8_t > &telegram) const |
| Adds the settings as data to the packetbuffer. More... | |
| bool | canBeExecutedWithoutSessionID () const |
| Returns if the command can be executed without a session ID. Will return false for most commands except the commands to establish a connection. More... | |
| ChangeCommSettingsCommand (Cola2Session &session, const datastructure::CommSettings &settings) | |
| Constructor of the Command, takes the current session and the new set of parameters for the sensor. More... | |
| bool | processReply () |
| Processes the return from the sensor. Checks if the method was acknowledged by the sensor. More... | |
 Public Member Functions inherited from sick::cola2::MethodCommand Public Member Functions inherited from sick::cola2::MethodCommand | |
| std::vector< uint8_t > | addTelegramData (const std::vector< uint8_t > &telegram) const |
| Adds the data to the telegram. More... | |
| bool | canBeExecutedWithoutSessionID () const |
| Returns if the command can be executed without a session ID. Will return false for most commands except the commands to establish a connection. More... | |
| uint16_t | getMethodIndex () const |
| MethodCommand (Cola2Session &session, const uint16_t &method_index) | |
| Constructor of the method command. More... | |
| bool | processReply () |
| Processes the return from the sensor. More... | |
| void | setMethodIndex (const uint16_t &method_index) |
| Public Member Functions inherited from sick::cola2::Command | |
| Command (sick::cola2::Cola2Session &session, const uint16_t &command_type, const uint16_t &command_mode) | |
| Constructor of the command. Sets the common variables for a command to the sensor. More... | |
| std::vector< uint8_t > | constructTelegram (const std::vector< uint8_t > &telegram) const |
| Adds the data to the telegram and afterwards the header with the correct length. More... | |
| uint8_t | getCommandMode () const |
| Returns the command mode. More... | |
| uint8_t | getCommandType () const |
| Returns the command type. More... | |
| std::vector< uint8_t > | getDataVector () const |
| Returns the data vector. More... | |
| uint16_t | getRequestID () const |
| Returns the request id of the command. More... | |
| uint32_t | getSessionID () const |
| Returns the current session ID. More... | |
| void | lockExecutionMutex () |
| Locks a mutex to prevent other commands being executed in parallel. More... | |
| void | processReplyBase (const std::vector< uint8_t > &packet) |
| Parses the da incoming data package and then processes it with the inherited processReply. Afterwards the mutex will be unlocked to allow new commands to be send. More... | |
| void | setCommandMode (const uint8_t &command_mode) |
| Sets the command mode. More... | |
| void | setCommandType (const uint8_t &command_type) |
| Sets the command type. More... | |
| void | setDataVector (const std::vector< uint8_t > &data) |
| Sets the data vector. More... | |
| void | setRequestID (const uint16_t &request_id) |
| Sets the request ID of the command. More... | |
| void | setSessionID (const uint32_t &session_id) |
| Sets the session ID. More... | |
| void | waitForCompletion () |
| Scooped call to the mutex, which will block until the reply was processed. More... | |
| bool | wasSuccessful () const |
| Returns if the command was successfully parsed. More... | |
| virtual | ~Command () |
| We have virtual member functions, so a virtual destructor is needed. More... | |
Private Member Functions | |
| void | writeChannelToDataPtr (std::vector< uint8_t >::iterator data_ptr) const |
| void | writeDataToDataPtr (std::vector< uint8_t >::iterator data_ptr) const |
| void | writeEInterfaceTypeToDataPtr (std::vector< uint8_t >::iterator data_ptr) const |
| void | writeEnabledToDataPtr (std::vector< uint8_t >::iterator data_ptr) const |
| void | writeEndAngleToDataPtr (std::vector< uint8_t >::iterator data_ptr) const |
| void | writeFeaturesToDataPtr (std::vector< uint8_t >::iterator data_ptr) const |
| void | writeFrequencyToDataPtr (std::vector< uint8_t >::iterator data_ptr) const |
| void | writeIPAddresstoDataPtr (std::vector< uint8_t >::iterator data_ptr) const |
| void | writePortToDataPtr (std::vector< uint8_t >::iterator data_ptr) const |
| void | writeStartAngleToDataPtr (std::vector< uint8_t >::iterator data_ptr) const |
Private Attributes | |
| sick::datastructure::CommSettings | m_settings |
Additional Inherited Members | |
| Protected Member Functions inherited from sick::cola2::Command | |
| std::vector< uint8_t > | expandTelegram (const std::vector< uint8_t > &telegram, size_t additional_bytes) const |
| Protected Attributes inherited from sick::cola2::Command | |
| sick::cola2::Cola2Session & | m_session |
Detailed Description
Method command class for changing the settings in the sensor. Such as which data packages to enable.
Definition at line 51 of file ChangeCommSettingsCommand.h.
Member Typedef Documentation
Typedef to reference the base class.
Definition at line 57 of file ChangeCommSettingsCommand.h.
Constructor & Destructor Documentation
| sick::cola2::ChangeCommSettingsCommand::ChangeCommSettingsCommand | ( | Cola2Session & | session, |
| const datastructure::CommSettings & | settings | ||
| ) |
Constructor of the Command, takes the current session and the new set of parameters for the sensor.
- Parameters
-
session The current Cola2 session, in which the parameters should be transferred. settings The new settings for the sensor. While the command will be executed in the session, these parameters will be set in the sensor.
Definition at line 44 of file ChangeCommSettingsCommand.cpp.
Member Function Documentation
|
virtual |
Adds the settings as data to the packetbuffer.
- Parameters
-
telegram The telegram, which will be modified the settings as data.
- Returns
- Completed telegram
Implements sick::cola2::Command.
Definition at line 52 of file ChangeCommSettingsCommand.cpp.
| bool sick::cola2::ChangeCommSettingsCommand::canBeExecutedWithoutSessionID | ( | ) | const |
Returns if the command can be executed without a session ID. Will return false for most commands except the commands to establish a connection.
- Returns
- If the command needs a session ID to be executed.
Definition at line 79 of file ChangeCommSettingsCommand.cpp.
|
virtual |
Processes the return from the sensor. Checks if the method was acknowledged by the sensor.
- Returns
- If processing of the returned data was successful.
Implements sick::cola2::Command.
Definition at line 84 of file ChangeCommSettingsCommand.cpp.
|
private |
Definition at line 89 of file ChangeCommSettingsCommand.cpp.
|
private |
Definition at line 66 of file ChangeCommSettingsCommand.cpp.
|
private |
Definition at line 100 of file ChangeCommSettingsCommand.cpp.
|
private |
Definition at line 94 of file ChangeCommSettingsCommand.cpp.
|
private |
Definition at line 129 of file ChangeCommSettingsCommand.cpp.
|
private |
Definition at line 135 of file ChangeCommSettingsCommand.cpp.
|
private |
Definition at line 117 of file ChangeCommSettingsCommand.cpp.
|
private |
Definition at line 106 of file ChangeCommSettingsCommand.cpp.
|
private |
Definition at line 112 of file ChangeCommSettingsCommand.cpp.
|
private |
Definition at line 123 of file ChangeCommSettingsCommand.cpp.
Member Data Documentation
|
private |
Definition at line 98 of file ChangeCommSettingsCommand.h.
The documentation for this class was generated from the following files: