#include <rtabmap/core/RtabmapExp.h>#include <rtabmap/core/Transform.h>#include <pcl/point_cloud.h>#include <pcl/point_types.h>#include <pcl/pcl_base.h>#include <pcl/ModelCoefficients.h>#include <rtabmap/core/LaserScan.h>
Include dependency graph for util3d_filtering.h:
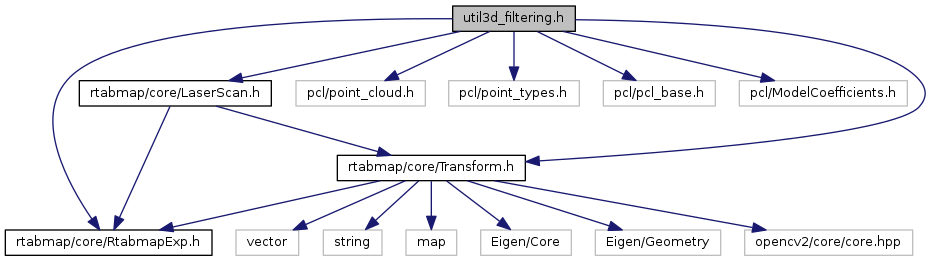
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| rtabmap | |
| rtabmap::util3d | |
Functions | |
| LaserScan RTABMAP_EXP | rtabmap::util3d::commonFiltering (const LaserScan &scan, int downsamplingStep, float rangeMin=0.0f, float rangeMax=0.0f, float voxelSize=0.0f, int normalK=0, float normalRadius=0.0f, float groundNormalsUp=0.0f) |
| pcl::IndicesPtr RTABMAP_EXP | rtabmap::util3d::cropBox (const pcl::PCLPointCloud2::Ptr &cloud, const pcl::IndicesPtr &indices, const Eigen::Vector4f &min, const Eigen::Vector4f &max, const Transform &transform=Transform::getIdentity(), bool negative=false) |
| pcl::IndicesPtr RTABMAP_EXP | rtabmap::util3d::cropBox (const pcl::PointCloud< pcl::PointXYZ >::Ptr &cloud, const pcl::IndicesPtr &indices, const Eigen::Vector4f &min, const Eigen::Vector4f &max, const Transform &transform=Transform::getIdentity(), bool negative=false) |
| pcl::IndicesPtr RTABMAP_EXP | rtabmap::util3d::cropBox (const pcl::PointCloud< pcl::PointNormal >::Ptr &cloud, const pcl::IndicesPtr &indices, const Eigen::Vector4f &min, const Eigen::Vector4f &max, const Transform &transform=Transform::getIdentity(), bool negative=false) |
| pcl::IndicesPtr RTABMAP_EXP | rtabmap::util3d::cropBox (const pcl::PointCloud< pcl::PointXYZRGB >::Ptr &cloud, const pcl::IndicesPtr &indices, const Eigen::Vector4f &min, const Eigen::Vector4f &max, const Transform &transform=Transform::getIdentity(), bool negative=false) |
| pcl::IndicesPtr RTABMAP_EXP | rtabmap::util3d::cropBox (const pcl::PointCloud< pcl::PointXYZRGBNormal >::Ptr &cloud, const pcl::IndicesPtr &indices, const Eigen::Vector4f &min, const Eigen::Vector4f &max, const Transform &transform=Transform::getIdentity(), bool negative=false) |
| pcl::PointCloud< pcl::PointXYZ >::Ptr RTABMAP_EXP | rtabmap::util3d::cropBox (const pcl::PointCloud< pcl::PointXYZ >::Ptr &cloud, const Eigen::Vector4f &min, const Eigen::Vector4f &max, const Transform &transform=Transform::getIdentity(), bool negative=false) |
| pcl::PointCloud< pcl::PointNormal >::Ptr RTABMAP_EXP | rtabmap::util3d::cropBox (const pcl::PointCloud< pcl::PointNormal >::Ptr &cloud, const Eigen::Vector4f &min, const Eigen::Vector4f &max, const Transform &transform=Transform::getIdentity(), bool negative=false) |
| pcl::PointCloud< pcl::PointXYZRGB >::Ptr RTABMAP_EXP | rtabmap::util3d::cropBox (const pcl::PointCloud< pcl::PointXYZRGB >::Ptr &cloud, const Eigen::Vector4f &min, const Eigen::Vector4f &max, const Transform &transform=Transform::getIdentity(), bool negative=false) |
| pcl::PointCloud< pcl::PointXYZINormal >::Ptr RTABMAP_EXP | rtabmap::util3d::cropBox (const pcl::PointCloud< pcl::PointXYZINormal >::Ptr &cloud, const Eigen::Vector4f &min, const Eigen::Vector4f &max, const Transform &transform=Transform::getIdentity(), bool negative=false) |
| pcl::PointCloud< pcl::PointXYZRGBNormal >::Ptr RTABMAP_EXP | rtabmap::util3d::cropBox (const pcl::PointCloud< pcl::PointXYZRGBNormal >::Ptr &cloud, const Eigen::Vector4f &min, const Eigen::Vector4f &max, const Transform &transform=Transform::getIdentity(), bool negative=false) |
| LaserScan RTABMAP_EXP | rtabmap::util3d::downsample (const LaserScan &cloud, int step) |
| pcl::PointCloud< pcl::PointXYZ >::Ptr RTABMAP_EXP | rtabmap::util3d::downsample (const pcl::PointCloud< pcl::PointXYZ >::Ptr &cloud, int step) |
| pcl::PointCloud< pcl::PointXYZRGB >::Ptr RTABMAP_EXP | rtabmap::util3d::downsample (const pcl::PointCloud< pcl::PointXYZRGB >::Ptr &cloud, int step) |
| pcl::PointCloud< pcl::PointXYZI >::Ptr RTABMAP_EXP | rtabmap::util3d::downsample (const pcl::PointCloud< pcl::PointXYZI >::Ptr &cloud, int step) |
| pcl::PointCloud< pcl::PointNormal >::Ptr RTABMAP_EXP | rtabmap::util3d::downsample (const pcl::PointCloud< pcl::PointNormal >::Ptr &cloud, int step) |
| pcl::PointCloud< pcl::PointXYZRGBNormal >::Ptr RTABMAP_EXP | rtabmap::util3d::downsample (const pcl::PointCloud< pcl::PointXYZRGBNormal >::Ptr &cloud, int step) |
| pcl::PointCloud< pcl::PointXYZINormal >::Ptr RTABMAP_EXP | rtabmap::util3d::downsample (const pcl::PointCloud< pcl::PointXYZINormal >::Ptr &cloud, int step) |
| std::vector< pcl::IndicesPtr > RTABMAP_EXP | rtabmap::util3d::extractClusters (const pcl::PointCloud< pcl::PointXYZ >::Ptr &cloud, float clusterTolerance, int minClusterSize, int maxClusterSize=std::numeric_limits< int >::max(), int *biggestClusterIndex=0) |
| std::vector< pcl::IndicesPtr > RTABMAP_EXP | rtabmap::util3d::extractClusters (const pcl::PointCloud< pcl::PointXYZRGB >::Ptr &cloud, float clusterTolerance, int minClusterSize, int maxClusterSize=std::numeric_limits< int >::max(), int *biggestClusterIndex=0) |
| std::vector< pcl::IndicesPtr > RTABMAP_EXP | rtabmap::util3d::extractClusters (const pcl::PointCloud< pcl::PointXYZ >::Ptr &cloud, const pcl::IndicesPtr &indices, float clusterTolerance, int minClusterSize, int maxClusterSize=std::numeric_limits< int >::max(), int *biggestClusterIndex=0) |
| Wrapper of the pcl::EuclideanClusterExtraction class. More... | |
| std::vector< pcl::IndicesPtr > RTABMAP_EXP | rtabmap::util3d::extractClusters (const pcl::PointCloud< pcl::PointNormal >::Ptr &cloud, const pcl::IndicesPtr &indices, float clusterTolerance, int minClusterSize, int maxClusterSize=std::numeric_limits< int >::max(), int *biggestClusterIndex=0) |
| std::vector< pcl::IndicesPtr > RTABMAP_EXP | rtabmap::util3d::extractClusters (const pcl::PointCloud< pcl::PointXYZRGB >::Ptr &cloud, const pcl::IndicesPtr &indices, float clusterTolerance, int minClusterSize, int maxClusterSize=std::numeric_limits< int >::max(), int *biggestClusterIndex=0) |
| std::vector< pcl::IndicesPtr > RTABMAP_EXP | rtabmap::util3d::extractClusters (const pcl::PointCloud< pcl::PointXYZRGBNormal >::Ptr &cloud, const pcl::IndicesPtr &indices, float clusterTolerance, int minClusterSize, int maxClusterSize=std::numeric_limits< int >::max(), int *biggestClusterIndex=0) |
| pcl::IndicesPtr RTABMAP_EXP | rtabmap::util3d::extractIndices (const pcl::PointCloud< pcl::PointXYZ >::Ptr &cloud, const pcl::IndicesPtr &indices, bool negative) |
| pcl::IndicesPtr RTABMAP_EXP | rtabmap::util3d::extractIndices (const pcl::PointCloud< pcl::PointNormal >::Ptr &cloud, const pcl::IndicesPtr &indices, bool negative) |
| pcl::IndicesPtr RTABMAP_EXP | rtabmap::util3d::extractIndices (const pcl::PointCloud< pcl::PointXYZRGB >::Ptr &cloud, const pcl::IndicesPtr &indices, bool negative) |
| pcl::IndicesPtr RTABMAP_EXP | rtabmap::util3d::extractIndices (const pcl::PointCloud< pcl::PointXYZRGBNormal >::Ptr &cloud, const pcl::IndicesPtr &indices, bool negative) |
| pcl::PointCloud< pcl::PointXYZ >::Ptr RTABMAP_EXP | rtabmap::util3d::extractIndices (const pcl::PointCloud< pcl::PointXYZ >::Ptr &cloud, const pcl::IndicesPtr &indices, bool negative, bool keepOrganized) |
| pcl::PointCloud< pcl::PointXYZRGB >::Ptr RTABMAP_EXP | rtabmap::util3d::extractIndices (const pcl::PointCloud< pcl::PointXYZRGB >::Ptr &cloud, const pcl::IndicesPtr &indices, bool negative, bool keepOrganized) |
| pcl::PointCloud< pcl::PointXYZRGBNormal >::Ptr RTABMAP_EXP | rtabmap::util3d::extractIndices (const pcl::PointCloud< pcl::PointXYZRGBNormal >::Ptr &cloud, const pcl::IndicesPtr &indices, bool negative, bool keepOrganized) |
| pcl::IndicesPtr | rtabmap::util3d::extractPlane (const pcl::PointCloud< pcl::PointXYZ >::Ptr &cloud, float distanceThreshold, int maxIterations=100, pcl::ModelCoefficients *coefficientsOut=0) |
| pcl::IndicesPtr | rtabmap::util3d::extractPlane (const pcl::PointCloud< pcl::PointXYZ >::Ptr &cloud, const pcl::IndicesPtr &indices, float distanceThreshold, int maxIterations=100, pcl::ModelCoefficients *coefficientsOut=0) |
| pcl::IndicesPtr RTABMAP_EXP | rtabmap::util3d::frustumFiltering (const pcl::PointCloud< pcl::PointXYZ >::Ptr &cloud, const pcl::IndicesPtr &indices, const Transform &cameraPose, float horizontalFOV, float verticalFOV, float nearClipPlaneDistance, float farClipPlaneDistance, bool negative=false) |
| pcl::PointCloud< pcl::PointXYZ >::Ptr RTABMAP_EXP | rtabmap::util3d::frustumFiltering (const pcl::PointCloud< pcl::PointXYZ >::Ptr &cloud, const Transform &cameraPose, float horizontalFOV, float verticalFOV, float nearClipPlaneDistance, float farClipPlaneDistance, bool negative=false) |
| pcl::PointCloud< pcl::PointXYZRGB >::Ptr RTABMAP_EXP | rtabmap::util3d::frustumFiltering (const pcl::PointCloud< pcl::PointXYZRGB >::Ptr &cloud, const Transform &cameraPose, float horizontalFOV, float verticalFOV, float nearClipPlaneDistance, float farClipPlaneDistance, bool negative=false) |
| pcl::IndicesPtr RTABMAP_EXP | rtabmap::util3d::normalFiltering (const pcl::PointCloud< pcl::PointXYZ >::Ptr &cloud, float angleMax, const Eigen::Vector4f &normal, int normalKSearch, const Eigen::Vector4f &viewpoint) |
| pcl::IndicesPtr RTABMAP_EXP | rtabmap::util3d::normalFiltering (const pcl::PointCloud< pcl::PointXYZRGB >::Ptr &cloud, float angleMax, const Eigen::Vector4f &normal, int normalKSearch, const Eigen::Vector4f &viewpoint) |
| pcl::IndicesPtr RTABMAP_EXP | rtabmap::util3d::normalFiltering (const pcl::PointCloud< pcl::PointXYZ >::Ptr &cloud, const pcl::IndicesPtr &indices, float angleMax, const Eigen::Vector4f &normal, int normalKSearch, const Eigen::Vector4f &viewpoint) |
| Given a normal and a maximum angle error, keep all points of the cloud respecting this normal. More... | |
| pcl::IndicesPtr RTABMAP_EXP | rtabmap::util3d::normalFiltering (const pcl::PointCloud< pcl::PointXYZRGB >::Ptr &cloud, const pcl::IndicesPtr &indices, float angleMax, const Eigen::Vector4f &normal, int normalKSearch, const Eigen::Vector4f &viewpoint) |
| pcl::IndicesPtr RTABMAP_EXP | rtabmap::util3d::normalFiltering (const pcl::PointCloud< pcl::PointNormal >::Ptr &cloud, const pcl::IndicesPtr &indices, float angleMax, const Eigen::Vector4f &normal, int normalKSearch, const Eigen::Vector4f &viewpoint) |
| pcl::IndicesPtr RTABMAP_EXP | rtabmap::util3d::normalFiltering (const pcl::PointCloud< pcl::PointXYZRGBNormal >::Ptr &cloud, const pcl::IndicesPtr &indices, float angleMax, const Eigen::Vector4f &normal, int normalKSearch, const Eigen::Vector4f &viewpoint) |
| pcl::IndicesPtr RTABMAP_EXP | rtabmap::util3d::passThrough (const pcl::PointCloud< pcl::PointXYZ >::Ptr &cloud, const pcl::IndicesPtr &indices, const std::string &axis, float min, float max, bool negative=false) |
| pcl::IndicesPtr RTABMAP_EXP | rtabmap::util3d::passThrough (const pcl::PointCloud< pcl::PointXYZRGB >::Ptr &cloud, const pcl::IndicesPtr &indices, const std::string &axis, float min, float max, bool negative=false) |
| pcl::IndicesPtr RTABMAP_EXP | rtabmap::util3d::passThrough (const pcl::PointCloud< pcl::PointXYZI >::Ptr &cloud, const pcl::IndicesPtr &indices, const std::string &axis, float min, float max, bool negative=false) |
| pcl::IndicesPtr RTABMAP_EXP | rtabmap::util3d::passThrough (const pcl::PointCloud< pcl::PointNormal >::Ptr &cloud, const pcl::IndicesPtr &indices, const std::string &axis, float min, float max, bool negative=false) |
| pcl::IndicesPtr RTABMAP_EXP | rtabmap::util3d::passThrough (const pcl::PointCloud< pcl::PointXYZRGBNormal >::Ptr &cloud, const pcl::IndicesPtr &indices, const std::string &axis, float min, float max, bool negative=false) |
| pcl::IndicesPtr RTABMAP_EXP | rtabmap::util3d::passThrough (const pcl::PointCloud< pcl::PointXYZINormal >::Ptr &cloud, const pcl::IndicesPtr &indices, const std::string &axis, float min, float max, bool negative=false) |
| pcl::PointCloud< pcl::PointXYZ >::Ptr RTABMAP_EXP | rtabmap::util3d::passThrough (const pcl::PointCloud< pcl::PointXYZ >::Ptr &cloud, const std::string &axis, float min, float max, bool negative=false) |
| pcl::PointCloud< pcl::PointXYZRGB >::Ptr RTABMAP_EXP | rtabmap::util3d::passThrough (const pcl::PointCloud< pcl::PointXYZRGB >::Ptr &cloud, const std::string &axis, float min, float max, bool negative=false) |
| pcl::PointCloud< pcl::PointXYZI >::Ptr RTABMAP_EXP | rtabmap::util3d::passThrough (const pcl::PointCloud< pcl::PointXYZI >::Ptr &cloud, const std::string &axis, float min, float max, bool negative=false) |
| pcl::PointCloud< pcl::PointNormal >::Ptr RTABMAP_EXP | rtabmap::util3d::passThrough (const pcl::PointCloud< pcl::PointNormal >::Ptr &cloud, const std::string &axis, float min, float max, bool negative=false) |
| pcl::PointCloud< pcl::PointXYZRGBNormal >::Ptr RTABMAP_EXP | rtabmap::util3d::passThrough (const pcl::PointCloud< pcl::PointXYZRGBNormal >::Ptr &cloud, const std::string &axis, float min, float max, bool negative=false) |
| pcl::PointCloud< pcl::PointXYZINormal >::Ptr RTABMAP_EXP | rtabmap::util3d::passThrough (const pcl::PointCloud< pcl::PointXYZINormal >::Ptr &cloud, const std::string &axis, float min, float max, bool negative=false) |
| pcl::IndicesPtr RTABMAP_EXP | rtabmap::util3d::radiusFiltering (const pcl::PointCloud< pcl::PointXYZ >::Ptr &cloud, float radiusSearch, int minNeighborsInRadius) |
| pcl::IndicesPtr RTABMAP_EXP | rtabmap::util3d::radiusFiltering (const pcl::PointCloud< pcl::PointNormal >::Ptr &cloud, float radiusSearch, int minNeighborsInRadius) |
| pcl::IndicesPtr RTABMAP_EXP | rtabmap::util3d::radiusFiltering (const pcl::PointCloud< pcl::PointXYZRGB >::Ptr &cloud, float radiusSearch, int minNeighborsInRadius) |
| pcl::IndicesPtr RTABMAP_EXP | rtabmap::util3d::radiusFiltering (const pcl::PointCloud< pcl::PointXYZRGBNormal >::Ptr &cloud, float radiusSearch, int minNeighborsInRadius) |
| pcl::IndicesPtr RTABMAP_EXP | rtabmap::util3d::radiusFiltering (const pcl::PointCloud< pcl::PointXYZ >::Ptr &cloud, const pcl::IndicesPtr &indices, float radiusSearch, int minNeighborsInRadius) |
| Wrapper of the pcl::RadiusOutlierRemoval class. More... | |
| pcl::IndicesPtr RTABMAP_EXP | rtabmap::util3d::radiusFiltering (const pcl::PointCloud< pcl::PointNormal >::Ptr &cloud, const pcl::IndicesPtr &indices, float radiusSearch, int minNeighborsInRadius) |
| pcl::IndicesPtr RTABMAP_EXP | rtabmap::util3d::radiusFiltering (const pcl::PointCloud< pcl::PointXYZRGB >::Ptr &cloud, const pcl::IndicesPtr &indices, float radiusSearch, int minNeighborsInRadius) |
| pcl::IndicesPtr RTABMAP_EXP | rtabmap::util3d::radiusFiltering (const pcl::PointCloud< pcl::PointXYZRGBNormal >::Ptr &cloud, const pcl::IndicesPtr &indices, float radiusSearch, int minNeighborsInRadius) |
| pcl::PointCloud< pcl::PointXYZ >::Ptr RTABMAP_EXP | rtabmap::util3d::randomSampling (const pcl::PointCloud< pcl::PointXYZ >::Ptr &cloud, int samples) |
| pcl::PointCloud< pcl::PointXYZRGB >::Ptr RTABMAP_EXP | rtabmap::util3d::randomSampling (const pcl::PointCloud< pcl::PointXYZRGB >::Ptr &cloud, int samples) |
| LaserScan RTABMAP_EXP | rtabmap::util3d::rangeFiltering (const LaserScan &scan, float rangeMin, float rangeMax) |
| pcl::PointCloud< pcl::PointXYZ >::Ptr RTABMAP_EXP | rtabmap::util3d::removeNaNFromPointCloud (const pcl::PointCloud< pcl::PointXYZ >::Ptr &cloud) |
| pcl::PointCloud< pcl::PointXYZRGB >::Ptr RTABMAP_EXP | rtabmap::util3d::removeNaNFromPointCloud (const pcl::PointCloud< pcl::PointXYZRGB >::Ptr &cloud) |
| pcl::PointCloud< pcl::PointXYZI >::Ptr RTABMAP_EXP | rtabmap::util3d::removeNaNFromPointCloud (const pcl::PointCloud< pcl::PointXYZI >::Ptr &cloud) |
| pcl::PointCloud< pcl::PointNormal >::Ptr RTABMAP_EXP | rtabmap::util3d::removeNaNNormalsFromPointCloud (const pcl::PointCloud< pcl::PointNormal >::Ptr &cloud) |
| pcl::PointCloud< pcl::PointXYZRGBNormal >::Ptr RTABMAP_EXP | rtabmap::util3d::removeNaNNormalsFromPointCloud (const pcl::PointCloud< pcl::PointXYZRGBNormal >::Ptr &cloud) |
| pcl::PointCloud< pcl::PointXYZINormal >::Ptr RTABMAP_EXP | rtabmap::util3d::removeNaNNormalsFromPointCloud (const pcl::PointCloud< pcl::PointXYZINormal >::Ptr &cloud) |
| rtabmap::util3d::RTABMAP_DEPRECATED (LaserScan RTABMAP_EXP commonFiltering(const LaserScan &scan, int downsamplingStep, float rangeMin, float rangeMax, float voxelSize, int normalK, float normalRadius, bool forceGroundNormalsUp),"Use version with groundNormalsUp as float. For forceGroundNormalsUp=true, set groundNormalsUp=0.8, otherwise set groundNormalsUp=0.0.") | |
| pcl::IndicesPtr RTABMAP_EXP | rtabmap::util3d::subtractAdaptiveFiltering (const pcl::PointCloud< pcl::PointXYZRGB >::Ptr &cloud, const pcl::IndicesPtr &indices, const pcl::PointCloud< pcl::PointXYZRGB >::Ptr &substractCloud, const pcl::IndicesPtr &substractIndices, float radiusSearchRatio=0.01, int minNeighborsInRadius=1, const Eigen::Vector3f &viewpoint=Eigen::Vector3f(0, 0, 0)) |
| pcl::IndicesPtr RTABMAP_EXP | rtabmap::util3d::subtractAdaptiveFiltering (const pcl::PointCloud< pcl::PointXYZRGBNormal >::Ptr &cloud, const pcl::IndicesPtr &indices, const pcl::PointCloud< pcl::PointXYZRGBNormal >::Ptr &substractCloud, const pcl::IndicesPtr &substractIndices, float radiusSearchRatio=0.01, float maxAngle=M_PI/4.0f, int minNeighborsInRadius=1, const Eigen::Vector3f &viewpoint=Eigen::Vector3f(0, 0, 0)) |
| pcl::PointCloud< pcl::PointXYZRGB >::Ptr RTABMAP_EXP | rtabmap::util3d::subtractFiltering (const pcl::PointCloud< pcl::PointXYZRGB >::Ptr &cloud, const pcl::PointCloud< pcl::PointXYZRGB >::Ptr &substractCloud, float radiusSearch, int minNeighborsInRadius=1) |
| pcl::IndicesPtr RTABMAP_EXP | rtabmap::util3d::subtractFiltering (const pcl::PointCloud< pcl::PointXYZRGB >::Ptr &cloud, const pcl::IndicesPtr &indices, const pcl::PointCloud< pcl::PointXYZRGB >::Ptr &substractCloud, const pcl::IndicesPtr &substractIndices, float radiusSearch, int minNeighborsInRadius=1) |
| pcl::PointCloud< pcl::PointNormal >::Ptr RTABMAP_EXP | rtabmap::util3d::subtractFiltering (const pcl::PointCloud< pcl::PointNormal >::Ptr &cloud, const pcl::PointCloud< pcl::PointNormal >::Ptr &substractCloud, float radiusSearch, float maxAngle=M_PI/4.0f, int minNeighborsInRadius=1) |
| pcl::IndicesPtr RTABMAP_EXP | rtabmap::util3d::subtractFiltering (const pcl::PointCloud< pcl::PointNormal >::Ptr &cloud, const pcl::IndicesPtr &indices, const pcl::PointCloud< pcl::PointNormal >::Ptr &substractCloud, const pcl::IndicesPtr &substractIndices, float radiusSearch, float maxAngle=M_PI/4.0f, int minNeighborsInRadius=1) |
| pcl::PointCloud< pcl::PointXYZINormal >::Ptr RTABMAP_EXP | rtabmap::util3d::subtractFiltering (const pcl::PointCloud< pcl::PointXYZINormal >::Ptr &cloud, const pcl::PointCloud< pcl::PointXYZINormal >::Ptr &substractCloud, float radiusSearch, float maxAngle=M_PI/4.0f, int minNeighborsInRadius=1) |
| pcl::PointCloud< pcl::PointXYZRGBNormal >::Ptr RTABMAP_EXP | rtabmap::util3d::subtractFiltering (const pcl::PointCloud< pcl::PointXYZRGBNormal >::Ptr &cloud, const pcl::PointCloud< pcl::PointXYZRGBNormal >::Ptr &substractCloud, float radiusSearch, float maxAngle=M_PI/4.0f, int minNeighborsInRadius=1) |
| pcl::IndicesPtr RTABMAP_EXP | rtabmap::util3d::subtractFiltering (const pcl::PointCloud< pcl::PointXYZINormal >::Ptr &cloud, const pcl::IndicesPtr &indices, const pcl::PointCloud< pcl::PointXYZINormal >::Ptr &substractCloud, const pcl::IndicesPtr &substractIndices, float radiusSearch, float maxAngle=M_PI/4.0f, int minNeighborsInRadius=1) |
| pcl::IndicesPtr RTABMAP_EXP | rtabmap::util3d::subtractFiltering (const pcl::PointCloud< pcl::PointXYZRGBNormal >::Ptr &cloud, const pcl::IndicesPtr &indices, const pcl::PointCloud< pcl::PointXYZRGBNormal >::Ptr &substractCloud, const pcl::IndicesPtr &substractIndices, float radiusSearch, float maxAngle=M_PI/4.0f, int minNeighborsInRadius=1) |
| pcl::PointCloud< pcl::PointXYZ >::Ptr | rtabmap::util3d::uniformSampling (const pcl::PointCloud< pcl::PointXYZ >::Ptr &cloud, float voxelSize) |
| pcl::PointCloud< pcl::PointXYZRGB >::Ptr | rtabmap::util3d::uniformSampling (const pcl::PointCloud< pcl::PointXYZRGB >::Ptr &cloud, float voxelSize) |
| pcl::PointCloud< pcl::PointXYZRGBNormal >::Ptr | rtabmap::util3d::uniformSampling (const pcl::PointCloud< pcl::PointXYZRGBNormal >::Ptr &cloud, float voxelSize) |
| pcl::PointCloud< pcl::PointXYZ >::Ptr RTABMAP_EXP | rtabmap::util3d::voxelize (const pcl::PointCloud< pcl::PointXYZ >::Ptr &cloud, const pcl::IndicesPtr &indices, float voxelSize) |
| pcl::PointCloud< pcl::PointNormal >::Ptr RTABMAP_EXP | rtabmap::util3d::voxelize (const pcl::PointCloud< pcl::PointNormal >::Ptr &cloud, const pcl::IndicesPtr &indices, float voxelSize) |
| pcl::PointCloud< pcl::PointXYZRGB >::Ptr RTABMAP_EXP | rtabmap::util3d::voxelize (const pcl::PointCloud< pcl::PointXYZRGB >::Ptr &cloud, const pcl::IndicesPtr &indices, float voxelSize) |
| pcl::PointCloud< pcl::PointXYZRGBNormal >::Ptr RTABMAP_EXP | rtabmap::util3d::voxelize (const pcl::PointCloud< pcl::PointXYZRGBNormal >::Ptr &cloud, const pcl::IndicesPtr &indices, float voxelSize) |
| pcl::PointCloud< pcl::PointXYZI >::Ptr RTABMAP_EXP | rtabmap::util3d::voxelize (const pcl::PointCloud< pcl::PointXYZI >::Ptr &cloud, const pcl::IndicesPtr &indices, float voxelSize) |
| pcl::PointCloud< pcl::PointXYZINormal >::Ptr RTABMAP_EXP | rtabmap::util3d::voxelize (const pcl::PointCloud< pcl::PointXYZINormal >::Ptr &cloud, const pcl::IndicesPtr &indices, float voxelSize) |
| pcl::PointCloud< pcl::PointXYZ >::Ptr RTABMAP_EXP | rtabmap::util3d::voxelize (const pcl::PointCloud< pcl::PointXYZ >::Ptr &cloud, float voxelSize) |
| pcl::PointCloud< pcl::PointNormal >::Ptr RTABMAP_EXP | rtabmap::util3d::voxelize (const pcl::PointCloud< pcl::PointNormal >::Ptr &cloud, float voxelSize) |
| pcl::PointCloud< pcl::PointXYZRGB >::Ptr RTABMAP_EXP | rtabmap::util3d::voxelize (const pcl::PointCloud< pcl::PointXYZRGB >::Ptr &cloud, float voxelSize) |
| pcl::PointCloud< pcl::PointXYZRGBNormal >::Ptr RTABMAP_EXP | rtabmap::util3d::voxelize (const pcl::PointCloud< pcl::PointXYZRGBNormal >::Ptr &cloud, float voxelSize) |
| pcl::PointCloud< pcl::PointXYZI >::Ptr RTABMAP_EXP | rtabmap::util3d::voxelize (const pcl::PointCloud< pcl::PointXYZI >::Ptr &cloud, float voxelSize) |
| pcl::PointCloud< pcl::PointXYZINormal >::Ptr RTABMAP_EXP | rtabmap::util3d::voxelize (const pcl::PointCloud< pcl::PointXYZINormal >::Ptr &cloud, float voxelSize) |