#include <rokubimini_ethercat/RokubiminiEthercat.hpp>#include <rokubimini_msgs/Reading.h>#include <csignal>#include <thread>
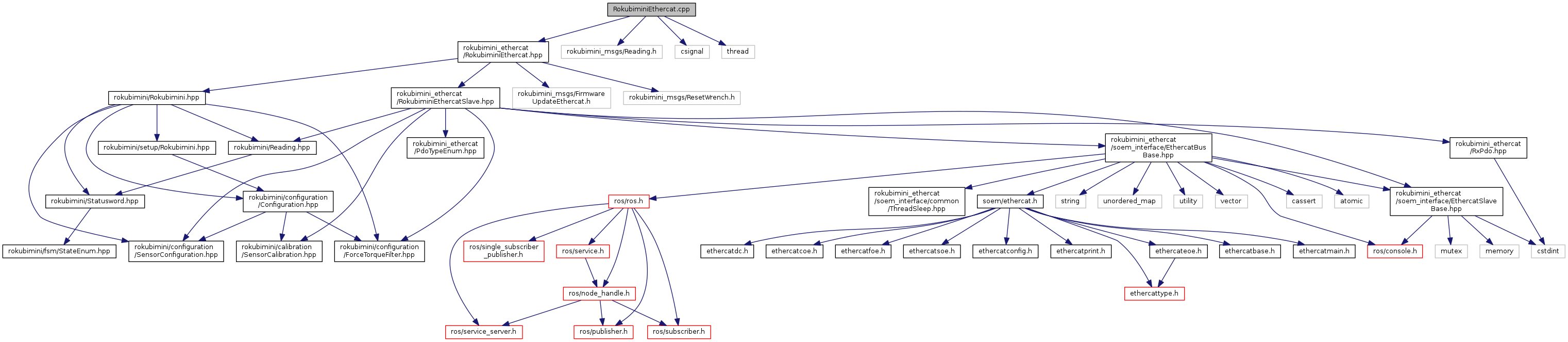
Include dependency graph for RokubiminiEthercat.cpp:
Go to the source code of this file.
Namespaces | |
| rokubimini | |
| rokubimini::ethercat | |
Typedefs | |
| using | rokubimini::ethercat::RokubiminiImuRos = sensor_msgs::Imu |
| using | rokubimini::ethercat::RokubiminiReadingRos = rokubimini_msgs::Reading |
| using | rokubimini::ethercat::RokubiminiTemperatureRos = sensor_msgs::Temperature |
| using | rokubimini::ethercat::RokubiminiWrenchRos = geometry_msgs::WrenchStamped |