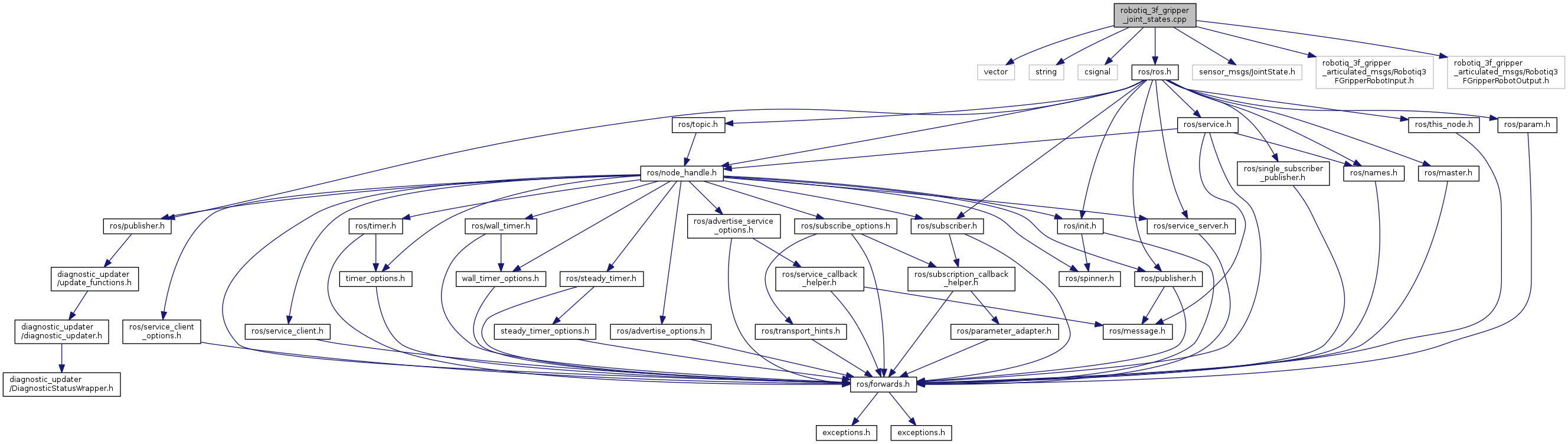
#include <vector>#include <string>#include <csignal>#include <ros/ros.h>#include <sensor_msgs/JointState.h>#include <robotiq_3f_gripper_articulated_msgs/Robotiq3FGripperRobotInput.h>#include <robotiq_3f_gripper_articulated_msgs/Robotiq3FGripperRobotOutput.h>
Include dependency graph for robotiq_3f_gripper_joint_states.cpp:
Go to the source code of this file.
Classes | |
| class | Finger |
| class | Robotiq3 |
Functions | |
| int | main (int argc, char *argv[]) |
Variables | |
| const double | DEG_TO_RAD = M_PI/180.0 |
Detailed Description
Subscribes to Robotiq state messages on "Robotiq3FGripperRobotInput" topic, converts the data to joint values, and publishes sensor_msgs/JointState messages on "joint_states" topic for Robotiq 3F gripper.
'rosrun robotiq_3f_gripper_joint_state_publisher robotiq_3f_gripper_joint_states <gripper_prefix>'
Definition in file robotiq_3f_gripper_joint_states.cpp.
Function Documentation
| int main | ( | int | argc, |
| char * | argv[] | ||
| ) |
Main method.
Definition at line 179 of file robotiq_3f_gripper_joint_states.cpp.
Variable Documentation
| const double DEG_TO_RAD = M_PI/180.0 |
Definition at line 46 of file robotiq_3f_gripper_joint_states.cpp.