#include <ros/ros.h>
Include dependency graph for optimization_params.h:

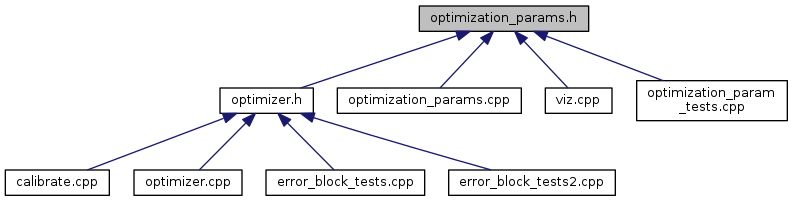
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | robot_calibration::OptimizationParams::FreeFrameInitialValue |
| struct | robot_calibration::OptimizationParams::FreeFrameParams |
| struct | robot_calibration::OptimizationParams |
| Class to hold parameters for optimization. More... | |
| struct | robot_calibration::OptimizationParams::Params |
Namespaces | |
| robot_calibration | |
| Calibration code lives under this namespace. | |