#include <string>#include <kdl/chain.hpp>#include <kdl/tree.hpp>#include <robot_calibration/calibration_offset_parser.h>#include <geometry_msgs/PointStamped.h>#include <sensor_msgs/JointState.h>#include <robot_calibration_msgs/CalibrationData.h>
Include dependency graph for chain.h:

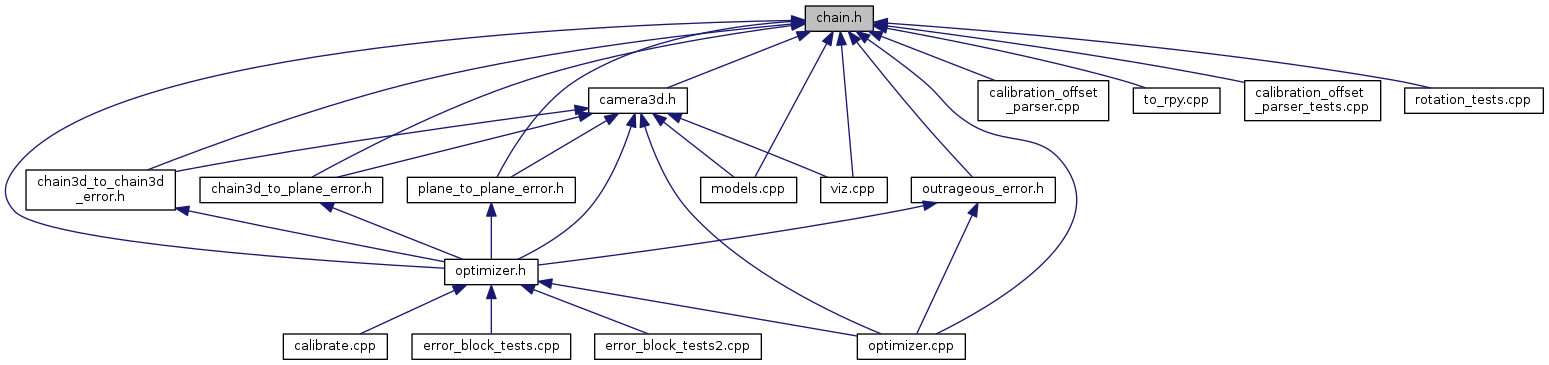
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | robot_calibration::ChainModel |
| Model of a kinematic chain. This is the basic instance where we transform the world observations into the proper root frame. More... | |
Namespaces | |
| robot_calibration | |
| Calibration code lives under this namespace. | |
Functions | |
| void | robot_calibration::axis_magnitude_from_rotation (const KDL::Rotation &r, double &x, double &y, double &z) |
| Converts from KDL::Rotation to angle-axis-with-integrated-magnitude. More... | |
| KDL::Rotation | robot_calibration::rotation_from_axis_magnitude (const double x, const double y, const double z) |
| Converts our angle-axis-with-integrated-magnitude representation to a KDL::Rotation. More... | |