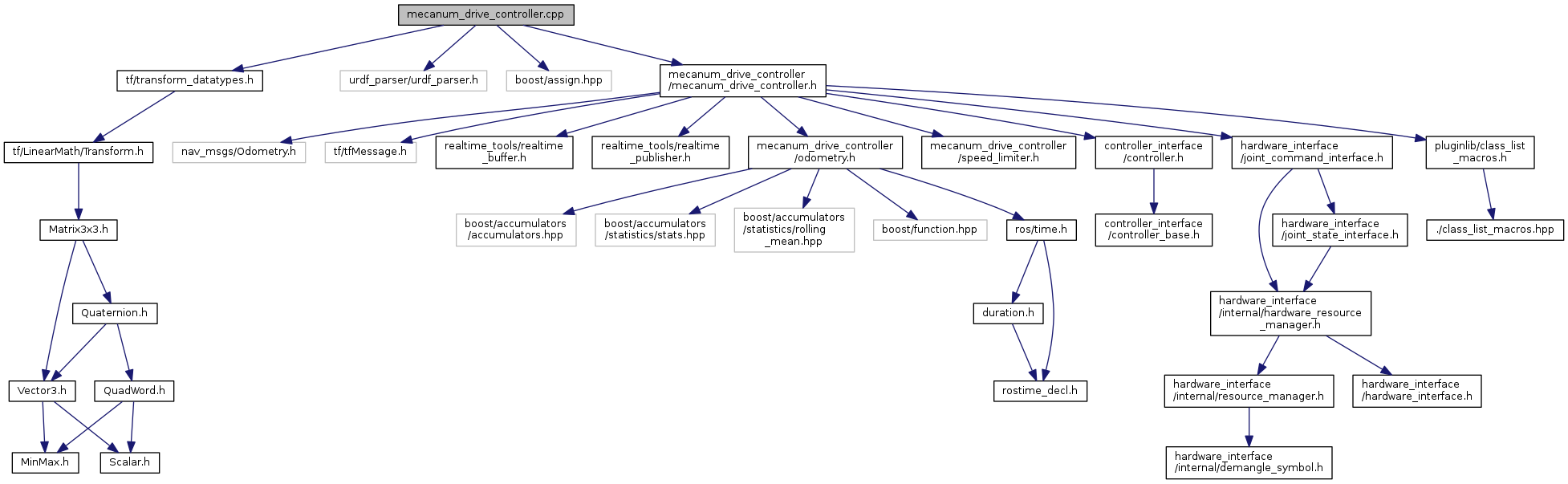
#include <tf/transform_datatypes.h>#include <urdf_parser/urdf_parser.h>#include <boost/assign.hpp>#include <mecanum_drive_controller/mecanum_drive_controller.h>
Include dependency graph for mecanum_drive_controller.cpp:
Go to the source code of this file.
Namespaces | |
| mecanum_drive_controller | |
Functions | |
| static bool | isCylinderOrSphere (const urdf::LinkConstSharedPtr &link) |
Function Documentation
|
static |
Definition at line 48 of file mecanum_drive_controller.cpp.