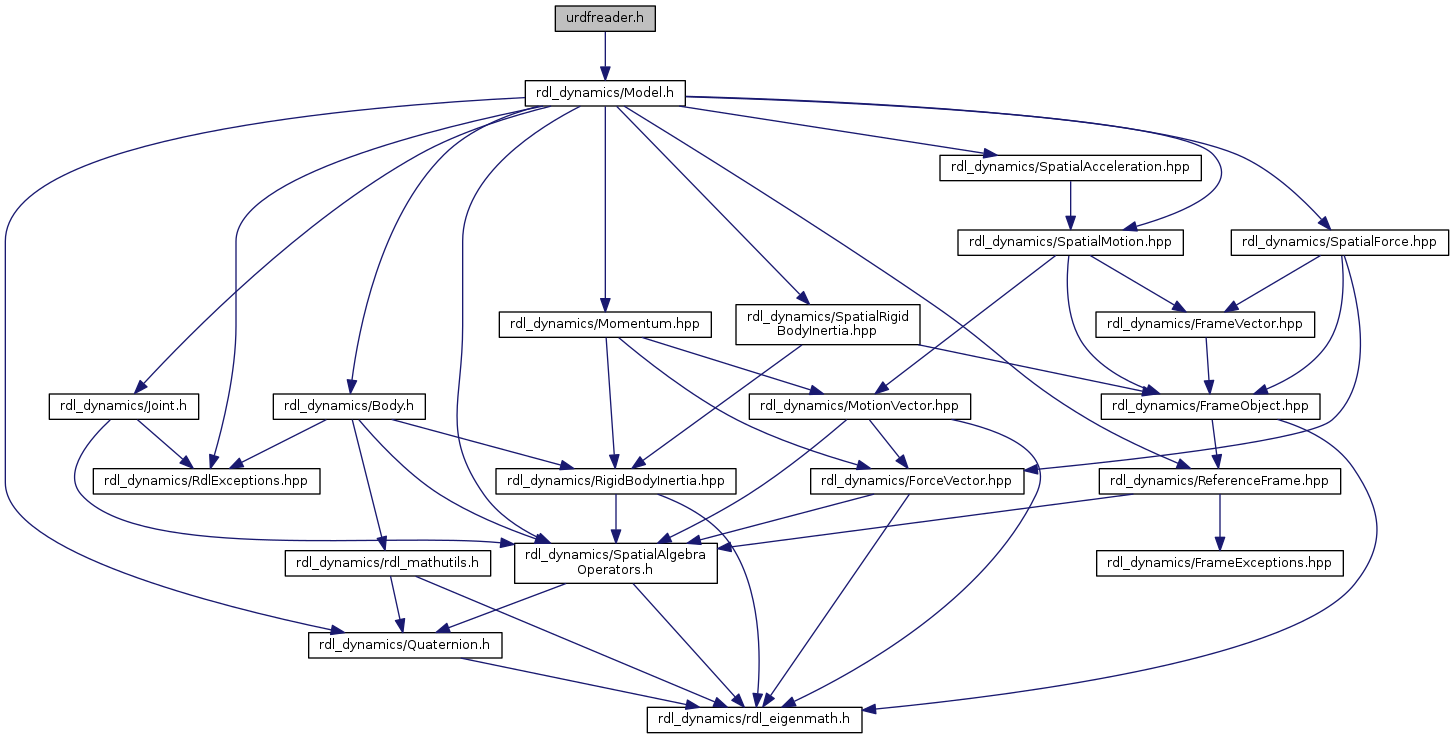
#include "rdl_dynamics/Model.h"
Include dependency graph for urdfreader.h:
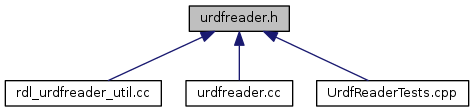
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| RobotDynamics | |
| RobotDynamics::Urdf | |
Functions | |
| bool | RobotDynamics::Urdf::parseJointAndBodyNamesFromString (const std::string &model_xml_string, std::vector< std::string > &joint_names, std::vector< std::string > &body_names) |
| This will build vectors of joint name and body name pairs. More... | |
| bool | RobotDynamics::Urdf::parseJointAndBodyNamesFromString (const char *model_xml_string, std::vector< std::string > &joint_names, std::vector< std::string > &body_names) |
| This will build vectors of joint name and body name pairs. More... | |
| bool | RobotDynamics::Urdf::parseJointAndQIndex (const RobotDynamics::Model &model, const std::vector< std::string > &body_names, std::vector< unsigned int > &q_indices) |
| This will build a vector of joint indices in the same order as the list of joints. More... | |
| bool | RobotDynamics::Urdf::parseJointAndQIndex (const std::string &model_xml_string, std::vector< unsigned int > &q_indices) |
| This will build a vector of joint indices in the same order as the list of joints. More... | |
| bool | RobotDynamics::Urdf::parseJointBodyNameMapFromFile (const char *filename, std::map< std::string, std::string > &jointBodyMap) |
| This will build a map of joint name to body name. More... | |
| bool | RobotDynamics::Urdf::parseJointBodyNameMapFromString (const char *model_xml_string, std::map< std::string, std::string > &jointBodyMap) |
| This will build a map of joint name to body name. More... | |
| bool | RobotDynamics::Urdf::parseJointBodyNameMapFromString (const std::string &model_xml_string, std::map< std::string, std::string > &jointBodyMap) |
| This will build a map of joint name to body name. More... | |
| bool | RobotDynamics::Urdf::urdfReadFromFile (const char *filename, ModelPtr model, bool floating_base, bool verbose=false) |
| Read urdf from file path. More... | |
| bool | RobotDynamics::Urdf::urdfReadFromFile (const std::string &filename, ModelPtr model) |
| Read urdf from file path. More... | |
| bool | RobotDynamics::Urdf::urdfReadFromString (const char *model_xml_string, ModelPtr model, bool floating_base, bool verbose=false) |
| Read urdf from string contents. More... | |
| bool | RobotDynamics::Urdf::urdfReadFromString (const std::string &model_xml_string, ModelPtr model) |
| Read urdf from string contents. More... | |